



數控機床虛擬裝配係統的研究
2025-4-10 來源:南京(jīng)工業大學工程訓練中心 作者:馬康榮
1.引言
在現(xiàn)代機(jī)械製(zhì)造業中,數控機床作為核心裝備之一,其性能與(yǔ)製造(zào)精度直接影響著工業生產的效率和產品的質量。隨著全球市場競爭的加劇及技術進步的推(tuī)動,中(zhōng)國機械製造業邁向數字化、定製化和智能化(huà)的(de)新階段。此背景下,傳統的數控機床設計與裝配流程麵臨著諸多挑戰,尤其是(shì)設計周(zhōu)期延長和裝配校驗成本(běn)提高等問題已成為製約行業發展的(de)瓶頸。因此探索(suǒ)一種能夠(gòu)提高設計效率、降低裝配成本並確保機床性能的新技術尤為迫切。
2. 數控機床虛(xū)擬裝配係統總體設計
2.1 係統結構設計
在數控機床虛擬裝配係統的研發過程中,係統(tǒng)結構(gòu)設(shè)計扮演了(le)至(zhì)關(guān)重要的基礎性角色(圖 1)。
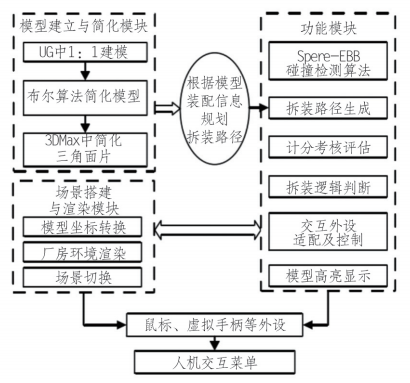
圖 1 係(xì)統整體結構
係統(tǒng)旨在構建一(yī)個跨平台兼容、用戶友(yǒu)好的虛擬裝配環(huán)境,通過高度的沉浸感(gǎn)和直觀高(gāo)效的操作體驗(yàn),提升用戶(hù)工作效率。為達到(dào)這一目(mù)標,係統被細分為 4 個核心模塊 : 模(mó)型建立(lì)與簡化模塊、場景搭建與(yǔ)渲然模塊、功能模塊和人(rén)機交互模塊(kuài)。
場景搭建與渲染模塊(kuài)負責將模型放置於接近現(xiàn)實的虛擬環境中,通過光源等渲染技術增強場(chǎng)景的真(zhēn)實感,為功能模塊的實施提供視覺基礎,確保用戶體驗既真(zhēn)實又舒(shū)適。
係統的核心組成部分是功能模塊,其集成裝配路徑規劃、零件拆卸與拾取等關鍵操作,在嚴格(gé)遵循機(jī)械工藝標準的(de)基礎上,設計並生成最佳的裝配路徑。為提高操作的精確度和(hé)響應速度,模塊中引入碰撞檢測機製(zhì)。此外,功能模塊還包含多功能區域,例如演(yǎn)示、練習和考試評估,以滿足不同用戶群體的訓練和(hé)評價需求。
人機(jī)交互(hù)模塊負責實現場景的無縫漫遊和切換。通過融合 Steam VR 插件,用(yòng)戶可以(yǐ)利用頭戴(dài)式顯示器和 Vive 操控器,從第一人稱視角進行場景探索和(hé)零件操縱。這一(yī)設計極大地提(tí)升了用戶的沉浸(jìn)感和操作的直觀性。
2.2 係統設計方(fāng)法
在數控機床(chuáng)虛擬裝配(pèi)係統的實現研究中,為確保最終係(xì)統功能完備、用戶沉浸感強,係(xì)統設計方(fāng)法須具備科學性和合(hé)理性。本研究采用Unity 3D 作為開發引擎,詳細規劃了(le)從模型構建到最終係(xì)統集成與(yǔ)發布的全過程,係統搭(dā)建框架如圖 2 所示。首先,采用 UG(現稱為(wéi) NX)軟件(jiàn)對目標數控機床進行 1:1 的精確測繪工作(zuò),確保模型的幾何精度與(yǔ)實(shí)物相符合。完成測繪後,將模型以標準轉換協議格式 STEP 導出(chū)。隨後,將所得的 STEP 格式模型引入至 3D Max 軟件環境中,進(jìn)行(háng)必要的優(yōu)化處理。這一階段主要移除模型中(zhōng)存在的(de)冗餘幾何元素,包括非(fēi)必要的(de)多層麵等,以及為模型賦予適當的材(cái)料和紋理(lǐ),進行渲染處理,從而提升視覺效果,確(què)保模型在虛擬環境中的真實性和逼真度 。
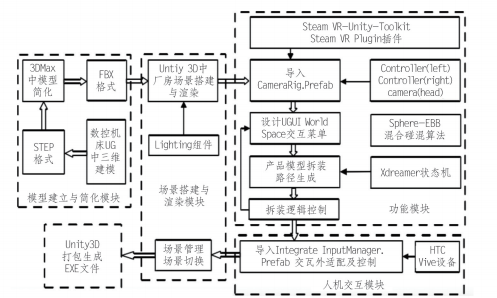
圖 2 係統(tǒng)框架搭建
3. 數控(kòng)機床虛擬係統三維模型建構
3.1 機床模型建(jiàn)構
在數控機床虛(xū)擬裝配係統的開發研究(jiū)中,機床模型的構建是(shì)係統的基礎和核心要素。三維建模技術在此過程中發揮了重要(yào)作用,它運用計算機圖形學技術,精確地複製現實物體的幾何結構和表麵特征,以創造出高度逼真的複雜三(sān)維模型。在高度精細的虛擬仿真領域構建(jiàn)三維(wéi)環境,包含各種廠房、拆卸工(gōng)具(jù)和設備(bèi)。這些建築和工具以精確的三維模型形式(shì)呈現,其真實度直接影響用戶沉浸感(gǎn)的強度及整個係統(tǒng)交互性能的優(yōu)劣。
通過實地測量、綜合分析相(xiàng)關文獻資料,精心捕捉(zhuō)實體設(shè)備的準確尺寸(cùn)、外觀顏色和材料特性等關鍵信息。利(lì)用專業建模軟件進行幾何結構(gòu)的精確(què)複製,並根據應用需求設定相應的約束條件。為降低係統資源消耗,對(duì)模型的頂(dǐng)點數量和(hé)三角(jiǎo)麵片數(shù)量(liàng)進行優化 ; 為增(zēng)強現實感(gǎn),向模型中添加(jiā)物理屬性,包括重力和加速度。本研(yán)究選擇了 UG 軟件來構建數控機床模型(xíng),該軟(ruǎn)件在處理複雜實體和(hé)造型方麵具有顯(xiǎn)著(zhe)優勢,並支持多種建模技術的融合。
數控機床采用(yòng)自(zì)底向上的方法,先構(gòu)建基礎零件,再(zài)逐步組裝成上一級部件,最終完成整個機床的裝配。這種(zhǒng)方法有助於(yú)提高裝配效率,簡化裝配路徑規劃,並防止在零件繪製(zhì)過程中出現遺漏。在機械裝配工藝中,必須注意使用標準工具避免(miǎn)損害精密零件 ; 緊固螺栓時應均勻對稱操作 ; 所(suǒ)有電(diàn)氣元件的導線接頭需做好標記。依據實物數據,將零件模型拆解並分層級,利用多邊形編輯和高級命令(lìng)生成簡(jiǎn)單幾何體(tǐ),然後通(tōng)過布爾算(suàn)法(fǎ)構建(jiàn)複雜零件。
3.2 機床碰撞檢(jiǎn)測算法
混合層次包(bāo)圍盒算法(Hybrid HierarchicalBounding Volume Algorithm)是一(yī)種先進的碰撞檢測技術,其在構造包圍盒樹時,通過融合多種包圍盒的(de)互補特性,於樹的不同層級上部署不(bú)同性能的(de)包(bāo)圍盒。該算法的設計旨在提升碰撞檢測的準確性(xìng)和效率,有效避免模型(xíng)間的相互穿透問題。
算法的(de)實施過程可劃分為 3 個關鍵階段 : 預處(chù)理、初步檢測和精確檢測。
在預處理階段,算法涉及包圍盒(hé)的選擇,這一步驟需要考慮到包圍盒的幾何特性、係統(tǒng)資源配置及模(mó)型的特定屬性。在(zài)此基礎上,精(jīng)心規劃邊界體積層次結構(Bounding VolumeHierarchy,BVH)的結構設計和遍曆策(cè)略,以確保(bǎo)高效的碰撞查詢性能(néng)。
在初步檢測階段,算法利用所選包圍盒進行快速(sù)排除測試,以減少後續階段需要處理的(de)候選(xuǎn)物體數量。在此過程中,選擇(zé)球形(Sphere)包圍盒作為(wéi)根節點的(de)包圍體,其優勢在於能夠迅速排除大量不相交的物體,顯著降低三角基元的檢測負(fù)擔。
在精確(què)檢測階段,進行算法執行包圍盒間及三角形基元間的詳細相交測試,確保(bǎo)碰撞檢測的(de)高精度性。
包圍(wéi)盒層次結(jié)構樹的構建策略主要有 3 種 :自頂向下、自底向上和插入法。
(1)自頂向(xiàng)下的策略是最為廣泛采用的構建(jiàn)方法(fǎ),其核心在於遞歸算法的應用。這一策略的構建過程在(zài)邏輯上模擬了自然界中(zhōng)樹木的生長機製。在具體操作過程中,首先選擇(zé)包含整個模型所有幾何信息最(zuì)外層的包圍盒作為(wéi)層次結構樹(shù)的(de)根節點(diǎn)。依據樹的平衡原則和相關數(shù)據信息,通過遞歸的(de)方式將根節點劃分為多個(gè)子集,這些子集作為父節點即 “分叉”,繼(jì)續對各個子節點(diǎn)進行(háng)遞歸劃分,直至達(dá)到葉節點,即一個三角形基本元素。
(2)自底向(xiàng)上的策略主要(yào)通(tōng)過聚類合並算法來實現構建。在初始階段,需要對模型的三維數據進行全(quán)麵處理,獲取全部三(sān)角基本元素的信(xìn)息。針對每一(yī)個基本元素構建出最緊密的包圍盒,作為包圍盒層(céng)次結構樹的底層葉節點。根據三角基本元素間的相關性,將多個葉節點進(jìn)行聚(jù)類,逐步合並為一個新的子節點,然後繼續進(jìn)行(háng)節點類(lèi)的(de)合並,直至形成根節點。
(3)插入法主要是根據成本函數,將單(dān)個(gè)三角基本元素按(àn)照最低成本插入(rù)到樹型結構的節點處。通過不斷重(chóng)複此過程,將每個基本元素進行填充,最終構建出成本最低的包圍盒層次結構樹。
4. 數控(kòng)機床虛擬裝配(pèi)係統的實現
4.1 人機交互實(shí)現(xiàn)
在數(shù)控(kòng)機床虛擬裝配係統的開發過程中,人機交互的科學設計及精確實現對提升用戶體驗、增強係統實(shí)用性具有決定性作用。該係統融合了多種輸入設備,包括鼠標、觸屏及虛擬現實(VR)手(shǒu)柄,以實現一係列(liè)豐富的交互功能。係統的人機交互設計支持多硬件平台,包括智能手機、電腦 PC 端(duān)和 VR 設備,確保了使用(yòng)方(fāng)式的多樣性和廣(guǎng)泛的(de)可訪問性。用(yòng)戶可(kě)以通過(guò)不同的設備執行操作,例如進行場(chǎng)景切換、狀態機響應和碰撞反饋等。
碰撞反饋(kuì)機製通過Unity 3D 的射(shè)線和Gameobject 組件來實現。當模型間發生接觸時,係統會提(tí)供文字(zì)提示(shì),從(cóng)而增強操(cāo)作的直觀性和指導性。此外,人機界麵的設計采用 UGUI 係統,不僅直觀易用,而且允許開發人員(yuán)在運行(háng)過程中(zhōng)實時調整 UI 元素,從而提高開發效率和界麵的適應性。整個係統的(de)人機交互實現經過(guò)精心規劃與設計,使得數控機床虛擬(nǐ)裝配係統不僅具備強大(dà)的功能,還擁有友好的用戶界麵,確保用戶能夠輕鬆地與係統進行高效交互。這種交互設計的深度(dù)與廣度為用戶(hù)提供(gòng)了一個(gè)高度(dù)逼真、互動性強(qiáng)的虛擬裝配環境。
4.2 功能模塊實現(xiàn)
基(jī)於(yú)數控機床的裝配結構樹(shù)和位置約束,可以製作符合實際工藝的拆卸動畫。在 Unity 3D中(zhōng),使用(yòng) Animation 控(kòng)件(jiàn)的關鍵幀(zhēn)功能來關聯(lián)各個(gè)動畫,完成製作。以縱向進給係統為例,先根據機械規則和幾何建模信息逆序(xù)求解拆卸序列,然後從零件庫中調用所需的模型(xíng)和工具,並設置時間區間、路徑、偏移等參數。
用戶可通過點擊 “演(yǎn)示” 按鈕進入(rù)功能界麵。界麵提供時間軸播放器、步驟列表等提示框,以便輔助學習拆(chāi)卸過程。係統集成了人機交互的手柄功能按鍵,包括觸控板、菜單按鈕等(děng)。用戶(hù)可以通過手(shǒu)柄控製器上的腳本實現自主(zhǔ)漫遊。
虛擬裝配功能使用(yòng) C++ 語言編寫碰撞檢測算法,並與後台進行集成。在選中零(líng)件時,係統進行(háng)預處理,讀取三角(jiǎo)麵片的頂點(diǎn)索引,並生成(chéng)包圍(wéi)盒層(céng)次樹。當發生碰撞時,係統讀(dú)取 ID 信息,並將其反饋到文本框中。圖 3 所示的手輪觸(chù)碰尾架蓋時,係統會做出相應的響應,並彈出提示框(kuàng),以指導用戶的操作,提升其實操能(néng)力。
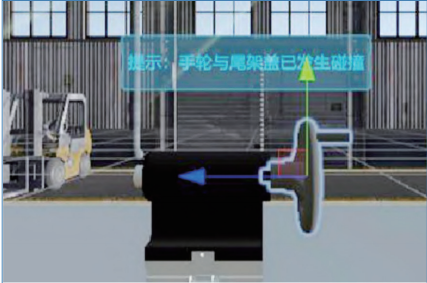
圖 3 零件(jiàn)發生碰撞效果
5. 結束語
本次研究成功實現數控機床虛(xū)擬裝配係統的功能模塊搭建 : 首先,進行數控(kòng)機(jī)床模型的構建,采用自下而上的裝配層次樹構建方法(fǎ)進行模(mó)型建設 ; 其次,基於混合層次包圍盒算法的碰撞檢測技術驗證其在碰撞檢測時間和檢測精度方麵的優越(yuè)性 ; 最後,完(wán)成數控機床虛擬裝配係統的設(shè)計和實現。通過該係統用戶可以進行真實感(gǎn)的虛擬裝配操作,並獲得實時的反饋和提示信息,提高用(yòng)戶的實操水(shuǐ)平。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行(háng)資訊合作,歡迎聯係(xì)本(běn)網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行(háng)資訊合作,歡迎聯係(xì)本(běn)網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

業(yè)界(jiè)視點
| 更多
查")
行(háng)業數據
| 更多
- 2025年1月 新能(néng)源汽車銷量情況
- 2024年12月 新能源汽車產(chǎn)量數據
- 2024年12月 基本(běn)型乘用車(轎車)產量(liàng)數據
- 2024年12月 軸承出口情況
- 2024年12月 分地區金屬切削機床(chuáng)產量數據
- 2024年(nián)12月 金屬切削機床產量數據
- 2024年11月 金屬切削機床產(chǎn)量數據
- 2024年11月 分地區金屬切削機床(chuáng)產量數據(jù)
- 2024年(nián)11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產量數據
- 2024年11月(yuè) 新能源汽車產量數據(jù)
- 2024年11月 新(xīn)能源汽車銷量情況
- 2024年10月 新能源汽車產量數據