一、問題的(de)提出
齒輪、蝸輪傳動精度要求越來越高, 對滾齒機(jī)的加工精度提出了更高的要求; 另方(fāng)麵, 采(cǎi)用/ 滾剃珩0工藝(yì)成批生產齒輪時, 由(yóu)於在剃齒和珩齒加工中會將一部分幾(jǐ)何偏心誤差轉化為運動偏心誤差, 故也要求滾齒加工具有較高的精度, 以免(miǎn)在剃、珩工序後公法線誤(wù)差超差。
分析滾齒機加工過程可以發現, 引起工件(jiàn)周節累積誤差的原因除工(gōng)件安裝因素以外, 其主要(yào)原因一是滾齒機分度傳動鏈的傳動誤差, 二是滾齒機工作台軸(zhóu)線漂移( 詳見參考(kǎo)文(wén)獻[ 2] ) 。另據參(cān)考文獻[ 1] 介紹,工件周(zhōu)節累(lèi)積誤差的2/ 3 是(shì)由滾齒機的分(fèn)度蝸杆蝸輪副( 特(tè)別是蝸輪的(de)製造及安裝誤差) 造成的。為此采用各種各樣的滾齒機補償裝置, 來補償滾齒機(jī)分度(dù)蝸杆蝸輪傳動副的傳動誤差, 以達到提高加工精度(dù)的目(mù)的(de)。現有(yǒu)滾齒機補償(cháng)裝置有(yǒu)如下幾種型式: 蝸杆竄動式, 行星齒輪式, 凸輪擺杆式和以(yǐ)控製論觀點(diǎn)設計的消除傳動誤差(chà)的機械反饋裝置等。以上幾種裝(zhuāng)置均是由(yóu)設計誤差修正凸輪, 並改裝機床來形成分度蝸杆的附加(jiā)轉動或附加軸向竄動, 從而(ér)造(zào)成分度蝸輪的附加轉動(dòng)來達到(dào)補償(cháng)傳動誤差(chà)的目的(de), 均存在機床改裝複雜、需精確銼削修正(zhèng)凸輪(lún)、安裝(zhuāng)檢修(xiū)麻煩等困(kùn)難, 而且有些裝置還(hái)存在著加工不同齒數的(de)直齒輪需銼削不同升程(chéng)的凸輪的缺點。
針(zhēn)對上述(shù)問題, 筆者設計了開(kāi)環數(shù)控誤差補償(cháng)裝置, 簡介如下。
二、開環數控誤差補償裝置的(de)結構與特點
1. 係統結構
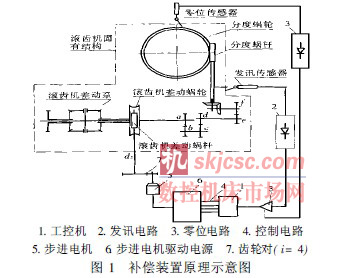
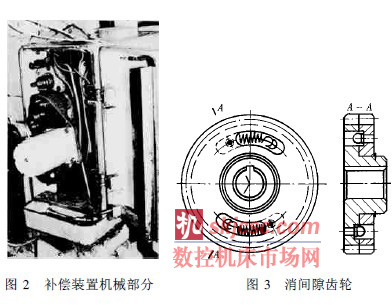
補(bǔ)償裝置原理參見圖1, 其由1 台工控機1、發訊電(diàn)路2、零位電路3、控製電路4、步進電機5 及(jí)驅動電源6 和一對降速比i= 4 的齒輪副7 組成。在滾齒(chǐ)機分度蝸輪蝸杆傳動誤差(chà)補(bǔ)償曲線中選定一點作為補償(cháng)起始點, 再(zài)將其對應的工作台位置標定為零點, 並設置零位傳(chuán)感器及零位電路(lù)3, 作為補償的基準; 在滾齒機差(chà)動掛輪箱中取下差動掛輪架, 在原安裝差動掛輪架的位置安(ān)裝重新設計的托架, 托架上裝有步進電機5,步(bù)進電機5 的軸與滾齒機差動係d2 軸( 滾齒機差動係差動蝸杆輸入軸(zhóu)) 通過一對降速(sù)比i= 4 的齒(chǐ)輪副7 相連( 如圖2) , i = 4 齒(chǐ)輪副7 主要作用是起係統連接作用, 同時也可降低步進電機5 的脈衝當量(liàng)。圖2 所示表明機械裝置(zhì)安裝簡單, 整個安裝(zhuāng)過程僅需幾分鍾, 且不需作任何調整, 為消除齒輪副的正反轉的傳(chuán)動間隙,固定在d2 軸上的大齒輪(lún)設計為如圖3 所示的消間隙齒輪。
2. 工作原理
首先精確檢測並擬(nǐ)合出(chū)滾齒機分度蝸輪蝸杆傳動誤差曲線, 然後(hòu)將相應的補償曲線按分度(dù)蝸輪(lún)轉角離(lí)散化, 並存入工控機1 的EPPROM 中; 在加工直齒時,根據加(jiā)工齒數按加工斜齒配置分齒掛輪及選擇差動離合器(qì), 根據加工中分度蝸輪的不同(tóng)轉角, 用工控機1 查找出相應轉角的補(bǔ)償脈衝值, 驅動步進電機5 高速(sù)正(zhèng)反(fǎn)轉, 將相應誤差修正量經i = 4 的齒輪副7, 輸入(rù)到d2 軸上, 此補償運動經(jīng)滾齒機差動蝸輪蝸杆副傳遞,在滾齒機運動合成機構(gòu)中與主運動合成, 經分齒掛輪a、b、c、d、e、f和一對錐齒輪, 共同驅(qū)動分度蝸杆, 這樣, 分度蝸杆除主運動以外(wài), 還迭加了一個從差動傳動鏈傳來的(de)高速附加轉(zhuǎn)動, 從而使分度蝸輪(lún)產生附(fù)加轉動來補償其傳動誤差(chà)。
3. 工作過程描述
首先向工控機1 輸入要加工的齒輪齒數, 由工控機(jī)1 根據存入的離(lí)散化的分度蝸輪蝸杆傳動誤差補償曲線及相應(yīng)的脈衝當量自動計算出相應於蝸輪每齒的補償正反轉步進脈衝數; 按下補償開關後, 在工作台轉到設定零位時, 由零位電路3 發出(chū)補償允許信號, 這時補償係統開始工作, 由發(fā)訊傳感(gǎn)器在分度蝸杆每轉一(yī)周時發出一個訊號, 經(jīng)由發訊電路2 處(chù)理後送至工控機1, 由工控機1 的累加器計算出分度(dù)蝸輪距離(lí)零位的(de)轉角, 然後根(gēn)據分度蝸輪轉角查得相應誤(wù)差修正脈衝量, 接(jiē)著由控製電路4 控製步進電源6, 驅動步進電機5 高速帶動固定(dìng)在滾齒機差(chà)動(dòng)係d2 軸上的消間隙齒輪, 通過運動合成機構產生分(fèn)度蝸輪的附加轉動來補償工作台對應(yīng)該轉角位置的傳動誤差, 工控機1 完成此工作後返回待命(mìng)狀況, 等待發訊電(diàn)路2 下一個信號的來臨, 並在累加數等於分度(dù)蝸輪齒數時將累加器重置為初始值。形象一點的描述, 可把(bǎ)工控機1 加步(bù)進電機5 的組(zǔ)合認同為一個補償的“數字凸輪”。
三、開環數控誤差補償(cháng)裝置補償效果驗證
1. 驗(yàn)證條件簡述
1) 驗證用機床( 見表1、表2)

2) 切削齒坯
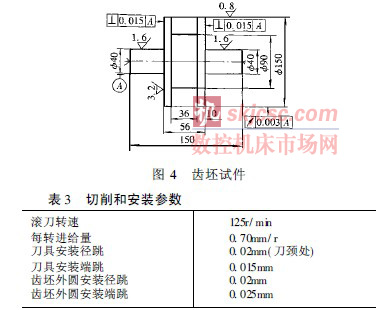
由於滾切加工時, 影響工件周節累積誤差因素較多, 如每次工(gōng)件的安裝(zhuāng)偏心就帶有(yǒu)隨機性, 為盡可能地使有補償與無補償試驗中各項條件及工藝係統各特性參數相同, 保證可比性, 設計(jì)了如圖4 所示齒(chǐ)坯製造基準、加(jiā)工安裝基準與測量基(jī)準重合的高精度雙聯齒坯試件, 以保證在(zài)相同安(ān)裝條件下安裝夾緊、加工及測量(liàng)。在(zài)加(jiā)工中一(yī)次走刀加工(gōng)出兩片輪齒, 僅僅區別在加工一片輪齒時不(bú)加補償運動, 加工另一片輪齒時加上(shàng)補償運動, 這樣, 通過從同一(yī)位置開始測量(liàng)雙聯齒輪的二片輪齒的周節累積誤差就可以比較補償(cháng)效果。
3) 切削和安裝參數( 見表3)
4) 測量儀器
使用德(dé)國進(jìn)口891E 齒輪測試中心: 測量誤(wù)差0. 001mm。
2. 補償效果
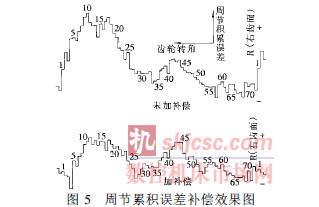
1) 齒輪周(zhōu)節累計誤差的補償效果( 實驗1)加工試(shì)件為m= 2, Z= 73 齒坯( 如圖4) , 試驗結果如圖5( 圖上數字表示從起點開始齒數) , 可以看出,齒輪周節累(lèi)積誤差(chà)由未加補償的0. 051mm 減小到有補償的0. 031mm, 效果相當(dāng)顯著, 但誤差曲線出現(xiàn)雙峰(fēng)特征。為檢驗圖5 所示的試驗結果是否存(cún)在偶然性,加(jiā)工(gōng)了約10 個各種齒數( 模數均為2, 避免換刀) 的如圖4 所示的齒輪。結果發現, 補償效果都很顯著, 降低誤差幅(fú)值均達30%~ 50%, 且各齒輪的周(zhōu)節累積誤差的曲線相位具有(yǒu)很好的一致性, 也幾乎在同一相位出現雙峰誤差。
2) 機床工作台回(huí)轉軸線(xiàn)漂移造成幾何偏(piān)心的補償 ( 實驗(yàn)2)
由文獻[ 2] 可以(yǐ)得知, 誤差/ 雙峰0現象的出現是由於機床工作台回(huí)轉軸線漂移(yí)造成, 工作台軸線漂移造成二方麵的誤差: 其中(zhōng)引起分度蝸輪蝸杆中心距Af 脈動造成(chéng)的傳動誤差已包含在分度蝸輪蝸(wō)杆(gǎn)傳動誤差曲線中(zhōng), 在實驗1 中已得到修正; 而(ér)引(yǐn)起加工齒輪與刀具中心(xīn)距Ao 脈動造(zào)成的類似於幾何偏(piān)心特征的傳動(dòng)誤差如(rú)何補償, 以前未見有文(wén)獻報道。
文(wén)獻(xiàn)[ 4] [ 7] 中曾(céng)介紹用幾何偏心來補償運(yùn)動偏心(xīn), 從而使齒輪左右齒麵周節累積誤差均減小的方法; 類似地(dì), 試采用人為造成(chéng)運(yùn)動(dòng)不均勻來觀察是否可補償由於Ao 脈動引起的類似幾何偏心特征的周節累積誤差。
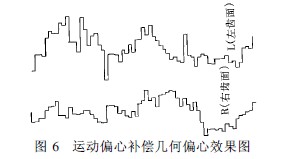
加工試件(jiàn)仍采(cǎi)用m= 2, Z = 60 齒坯( 如圖4) 。補償方法為在補償曲線的基礎(chǔ)上, 在周節累積誤差曲線中對(duì)應的二個低窪(wā)區相位迭加二個正三(sān)角波誤差(chà)修正量( 幅值(zhí)均為0. 02mm) 。
實驗結果見圖(tú)6, 可看出, 試件左、右齒麵在迭加補償波(bō)後(hòu)累(lèi)積誤差分別為0. 026, 0. 023, 均達到JB179 ) 83 規定的5 級精度, 雙峰形狀有了明顯改(gǎi)善。實驗證明, 用人為造成的運動不均勻也能補償由具有幾何偏心特征的誤差所造成的齒輪周節累積誤差。
3) 補償效果對後續工序的影響(xiǎng)( 實(shí)驗3)圖7 剃齒後周節累積誤差滾齒後(hòu)一般還有剃(tì)齒、珩齒工序, 將對齒輪(lún)周節(jiē)累積誤差均造成一定的影響,對(duì)實驗2 中已切齒的試件進行剃齒加工, 然後測量齒輪周節累積誤差, 實驗結(jié)果見圖7。對比圖6, 可以看出, 雙聯齒坯中經過補償的齒輪片右齒麵的周節累積誤(wù)差幅值無明顯變化, 但左齒麵周節累積誤差值略有增加, 但仍(réng)穩定在5 級精度 ( JB179 ) 83) 。而未加補(bǔ)償的齒輪片在剃(tì)齒後周節累積誤差曲線改(gǎi)變很大, 很大程度上改變成了單峰形狀,且誤差幅值有所增大, 實驗用m= 2, Z = 60 未(wèi)加補償的輪齒在剃後周節累積誤差幅值為(wéi)0. 046mm, 眾所周(zhōu)知, 剃齒加工糾正的是齒輪周節累積誤差中的(de)幾何偏心部分, 並會將部分幾何偏(piān)心誤差轉化為運(yùn)動偏心誤差, 由此可以認為, 經過補償的齒(chǐ)輪片在剃齒前(qián)、後, 輪齒左、右齒麵周節累(lèi)積誤(wù)差(chà)形狀、大小基本上無什(shí)麽變化, 說明該齒輪在(zài)滾齒後已基本上沒有Ao 脈動(dòng)的影響, 進一步驗證實驗2 中用(yòng)運動不(bú)均勻來(lái)修正Ao 脈動引起的(de)幾何偏心(xīn)誤差是成功的。從(cóng)這個角度也可看出開環(huán)數控補償(cháng)的價值, 即不但能方便地補償運動的不均勻, 還能方便地創造一個不均勻(yún)的運動來補(bǔ)償Ao 脈動引起的誤差, 使齒輪在(zài)滾、剃(tì)加工(gōng)後能穩定(dìng)地達到5級精度(dù)( JB179 ) 83) 。這對采(cǎi)用/ 滾剃(tì)珩0 工藝加工齒輪時, 防止齒輪公法(fǎ)線超差具有十分重要的意義。

四、結論
1. 用數控開環補償係統補償滾齒機範成(chéng)誤差的低頻部分( 特(tè)別是分度蝸(wō)杆蝸輪副的傳動(dòng)誤差(chà)) 效果是顯著的。平均降(jiàng)低(dī)齒輪周節累積誤差30% ~ 50% , 使原隻能加工(gōng)8 級精度的舊滾齒機可以穩定地加工出周節累積誤差精度為5 級(jí)的齒輪, 而且有足夠的(de)精度(dù)儲備,在經過剃齒加工後, 累積誤差仍可穩(wěn)定在5 級精度以(yǐ)內( JB179 ) 83) 。
2. 機床工作台軸線漂移可引起加工工件的徑向和切向誤差。軸線漂移誤差中Ao 脈動是1B1 反映在工件周節累積誤差中, 影響十分大, 設(shè)計的開環(huán)數(shù)控(kòng)係統可以方便地減小工作台軸(zhóu)線漂移(yí)引起的誤差, 這在國(guó)內尚末見報道。
3. 實踐證明, 設計的(de)數控開環補償係統設計合(hé)理,性能可靠, 操作方便, 且對機床無任(rèn)何改(gǎi)動( 甚至於不在機床上鑽一個安裝孔) , 特別是在試切幾個齒坯測量(liàng)後, 可以方便地對一些共性問題作局部調整, 極大地提高了工作效(xiào)益, 一般(bān)工廠均可方便地使(shǐ)用, 且造價不高, 具有一定的推廣價(jià)值。
4. 由於數控開環補償(cháng)係統占用了滾齒機(jī)的差動係(xì)統, 故它隻能補償加工直(zhí)齒輪及蝸輪, 不(bú)能補(bǔ)償加工斜齒輪及(jí)齒數> 100 的質數直(zhí)齒輪。
如果您(nín)有機床行業、企業相關新聞稿件發表,或進行資訊合(hé)作,歡迎(yíng)聯係本網(wǎng)編輯部, 郵箱(xiāng):skjcsc@vip.sina.com






馬")

