對於一般的機械係統,應從係統工程學及(jí)工程價值學的觀點去解決該係統機(jī)電及其他物理參數的協(xié)調和匹配的分析與綜合問題(tí)。研究這種分析與綜合的方法和理(lǐ)論就導致了機電一(yī)體化學科的形(xíng)成和發展。機器人係統就是一(yī)個極其典型的機電一體化係統,機器人運動(dòng)學及動力學則為這種(zhǒng)係(xì)統的機電一體化的分析與綜合提供必要的預(yù)備理論知識(shí)[1]。作者將機器人運動學的研究方法運用到加工中心中去。
機器人的運動學方程是表示機器(qì)人操(cāo)作機或機械手每個杆件在空間相對於絕對坐標係或相(xiàng)對於機器人(rén)機座坐標係的(de)位置及方向的方程[2]。對於加工中(zhōng)心來說,就是把具有相對運動的(de)各個(gè)部件(jiàn)看成杆件,用方程來表(biǎo)示銑頭刀(dāo)尖點相(xiàng)對於機床坐標係的位置和方向。
1 加工中心運動學(xué)方(fāng)程(chéng)的建立
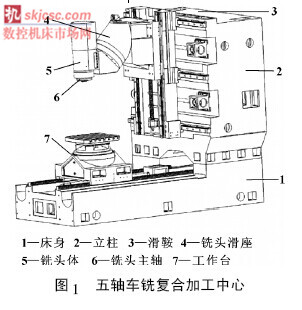
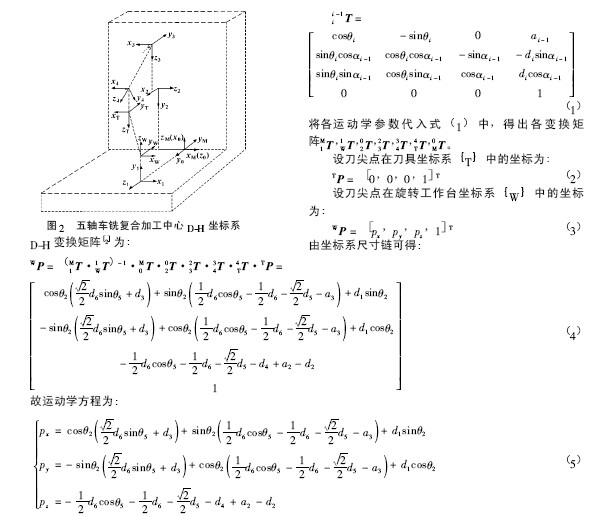
根(gēn)據五軸加工中心(xīn)的結構特點( 如圖1 所示) ,建立D-H 坐標係( 如圖2 所示) ,求解加工中(zhōng)心的運動學參數。圖中,{ M} 為機床坐標係,{ W} 為旋轉工作(zuò)台(tái)坐標係, { T} 為刀具坐標係,xiyi zi為中(zhōng)間坐標係(xì),i = 1,2,3,4。
(1) 運動學方程的正解(jiě)
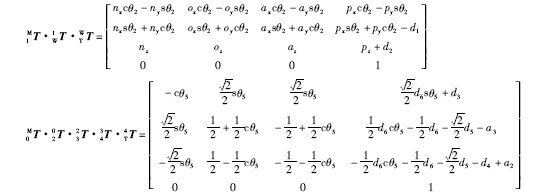
當加工中心操作機構的結構(gòu)參數已確定,並給(gěi)出各運動關節的運動參數,就可確定加(jiā)工中心末端執行器在(zài)機座坐標係(xì)中所處的位置和姿態(tài),這(zhè)就(jiù)是求解(jiě)加工中心運動學的正問題,也稱直接位置求(qiú)解。運(yùn)動學正問題的(de)求解方法是利用其運動學方(fāng)程進行坐標係的連續變換,即變(biàn)換矩陣的連乘,計算出矩陣中每個元素的值(zhí),它們就表示了在指定的參考坐標係中,加工中心(xīn)末端執行器的位置和姿態。矩陣是唯一的,因此在驅動裝置作用下操作機動(dòng)作時,就給定了一組結構參數和運動參數,加工中心運動學方程的正解(jiě)也是唯一的。
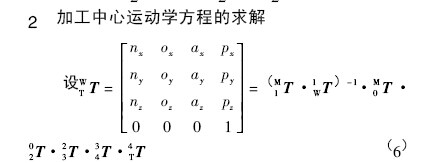
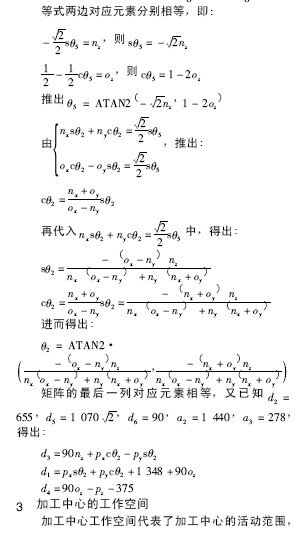
(2) 運動學(xué)方程的逆解[3]當加工中心末端執行器的(de)位置和姿態給定時,如(rú)何求出各(gè)關節變量(liàng),這就是求解加工中心運動學的(de)逆問題,也稱間(jiān)接位置求(qiú)解(jiě)。根據式( 6) 兩端(duān)矩陣元素應相(xiàng)等的原理,可得一組多變(biàn)量的三角函數方程。求解這些運動(dòng)參(cān)數,需解一組非線性超越函數方程。求解方法有3 種: 代數法、幾何法和數值解法。前兩類(lèi)方法是基於給出封閉解,它們適用於存(cún)在封閉逆解的加工中心。關於加工中心是否存在封閉逆解,對一般具有3 ~ 6 個關節的加工中心,有(yǒu)以下充分條件:①有3 個相(xiàng)鄰(lín)關節軸交於一點; ②有(yǒu)3 個(gè)相鄰關(guān)節軸(zhóu)相互平行。隻要(yào)滿足上述(shù)一個條件(jiàn),就存在封閉逆解。如CX 五軸車銑複合加工中心就滿足第二(èr)個(gè)條件。數值法由於隻給出數值,無需滿足上述條件,是一種通用的逆問題求解方法,但計算工作量大,目前尚難(nán)滿足實時控製的要求。
下麵介紹代(dài)數法中的(de)遞推逆變換法。將一組逆矩陣連續左乘式( 6) 兩端,可得若幹矩陣方(fāng)程,每個矩陣(zhèn)有12 個方程式; 在(zài)這些關係式中可選擇隻包含一個(gè)或不(bú)多(duō)於兩個待求運動參數的關(guān)係式,然後遞推求解,一般遞推過程不一定全部作
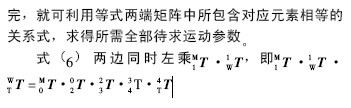
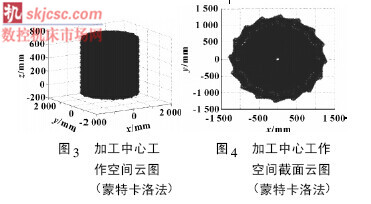
它是衡量加工中心工作能力的一個重要運動學指標。加(jiā)工(gōng)中心的工作空(kōng)間定義為: 加工中(zhōng)心正常運行時,末端(duān)執行器坐標係的原點能(néng)在空間活(huó)動的(de)最大範圍。這一(yī)空間又稱可達工作(zuò)空(kōng)間[4]。目前求解工作空間的(de)方法有很多,這裏分別運用蒙特卡洛法和極限(xiàn)邊界數值搜(sōu)索法來(lái)求解,具體方法如下:
(1) 蒙特卡洛(luò)法(fǎ)。各關節變(biàn)量在各自範圍內隨機取值,代(dài)入運(yùn)動(dòng)學(xué)方程求(qiú)出運動學正解,即得到末端三(sān)維坐標。
(2) 極限邊界數值搜索法,也稱窮舉法。首(shǒu)先求解運動(dòng)學逆解,然後在一定的範圍內取樣,通過運動(dòng)學逆解來確定(dìng)各運動學參(cān)數,再根(gēn)據約束條件來判斷是否在工作空間之內,由此搜索符合條件的(de)點即構成工作空間。
首先運用蒙特卡洛法,具體方法為讓各運動參數在(zài)各自範圍內按(àn)照一定步長取值,然後求得相應的運動方程的正解,也就得到了加工中心末端點的三維坐標(biāo)值,將(jiāng)這些點用圖形表示出來即可得到加工中心的工作空間[5],如圖3、圖4 所示。
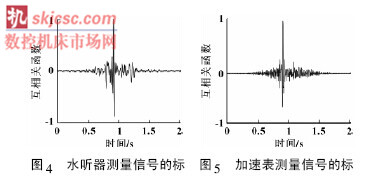
為了評估(gū)SCOT 加(jiā)權(quán)廣(guǎng)義互相關算法(fǎ)的精確度,d1被計算出來。針對水聽器的測量信號,分辨率為Δτ = 0. 017 s,計算得d1 = 73. 3 cm,相對誤差(chà)為(wéi)0. 27%。針對加速(sù)表的測(cè)量信號,分辨率Δτ = 0. 006s,計算得(dé)d1 = 73. 6 cm,相對誤(wù)差為0. 14%。
利用式( 8) 計算(suàn)SCOT 加權廣義(yì)互(hù)相關算法的方(fāng)差。水聽器測量信號的(de)標準偏差為- 0. 092,其標準偏差很小。加速表測量(liàng)信號的標準偏差是- 0. 092,其(qí)標準偏差也很小。由於帶通濾波器的存在,相對於SCOT 加權廣義互(hù)相關算法的分辨率,其標準偏差是無關緊要的,並且在今(jīn)後的船舶管係泄漏定位的實際(jì)操作中可以將其忽略。
4 結束語
在船舶複雜的背景噪聲中,船舶管係泄漏定位是船舶裝備監控係統中的重點,也是實現的難點。通過廣義加(jiā)權互相(xiàng)關法(fǎ),選擇(zé)SCOT 加權函數(shù),可以有效地抑製背景噪聲對泄漏(lòu)信號的影響,突出互相關函數(shù)峰值,提高定位(wèi)的準確性。通過(guò)實驗驗證,SCOT 加(jiā)權廣義互相關算法(fǎ)可很好地用於(yú)船舶管係泄漏定位,表現出了相對較好的魯(lǔ)棒性。
如果您有機床行業、企業相關新聞稿件(jiàn)發表,或進行(háng)資訊合(hé)作,歡迎聯係本網編(biān)輯部, 郵箱:skjcsc@vip.sina.com








