0 前言
五軸加工在三軸加工基礎上增加了兩個旋轉軸,從(cóng)而使加工方式更加靈活,材料去除率更高,加工時間更短,可以處理更為複(fù)雜的工件[1-2]。但是旋轉軸的運動也使刀具姿態控製更(gèng)為複雜,從而引入許多五軸加工所(suǒ)特有的問題[3-4]。奇(qí)異點問題就是其中重要的一個。當刀具通過奇異點(diǎn)附近區域(本文稱奇(qí)異區域)時,旋轉軸會產生不(bú)連(lián)續並且急速的轉動,這大大增加了非線性(xìng)誤差,同時極易破壞工件,甚至損傷機床部件[5-6]。因此,對奇異(yì)區域內的刀具路徑進行優(yōu)化處理,對於提高加工精度和加工效率至關重要。
AFFOUARD 等[6]提出(chū)通過多項(xiàng)式插補修改刀具路徑來避開奇異位置,但(dàn)是插補算法複雜,計算上代(dài)價較大。MUNLIN 等[7-8]通過選擇奇異點(diǎn)附近旋轉軸運動的(de)最短路徑來減小誤差,但該方法在選(xuǎn)擇轉角取值時,考慮的是相鄰點轉角變(biàn)化量的相對值最小,而相(xiàng)鄰點之(zhī)間轉角變化量的絕對值可能較大,出現這樣(yàng)的情況時(shí)誤差仍然較大(dà)。SORBY[9]提出的(de)方法是在奇異點附(fù)近插入刀位(wèi)點,同時修改C軸轉角,避免加工通過奇異點時誤差過大,但由於之前沒有對奇異區域的範圍進行檢測,因此當刀具穿過奇異區域卻不經過奇異點時,加工(gōng)精度不夠理想。王丹等[10]給出的通用的五軸加工非線性誤差控製算法也可以運用到奇異區域(yù)的處理上,但由於單純采用線性插值,使奇異區(qū)域內的(de)加工速度大大降低(dī),而且(qiě)插值過密容易導(dǎo)致機(jī)床頻繁地做加減速(sù)運動,易引起(qǐ)刀具顫振(zhèn)。
針(zhēn)對以上問題,本文在前(qián)人研究的基礎上,以AC 雙(shuāng)轉台五軸機床為例,給出一種將優化C 軸轉角(簡(jiǎn)稱C 角)、修改刀軸方向、遞歸線性插值三者結(jié)合的刀具路徑優化算法,從而在提高(gāo)奇異區(qū)域內加工精(jīng)度的同時,保證速度(dù)盡量快、加工更平穩。
1 五軸機床的運動學方程
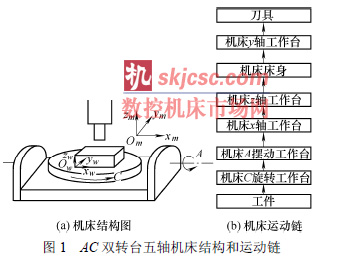
1.1 AC 雙轉台五軸機床正(zhèng)向反向運動學變換本文以AC 雙轉台五軸機(jī)床作為研究對象(圖1)。首先(xiān)根據其機床結構和運動鏈建立(lì)機床正向運動學方程(chéng)。設工件坐標係坐標原點為Ow,工(gōng)件坐標係下(xià)的刀具位置矢量為pw=(xw yw zw)T,刀(dāo)具(jù)方向矢量為uw=(i j k) T;機床坐標係原點(diǎn)為Om,機床線性軸運(yùn)動矢量為pm=(xm ym zm)T,機床旋轉軸為A 和C,對應的機(jī)床轉角分別為α 和γ。
根據圖1 所示的運動鏈,AC 雙轉台五軸機床的正(zhèng)向運動(dòng)學方程如下.
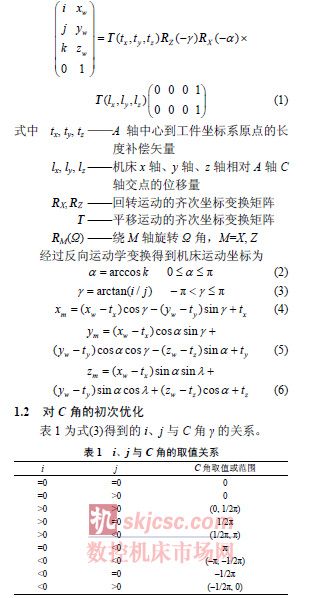
由(yóu)式(3)計算(suàn)出的原始C 角在(–π, π]之(zhī)間。由表1 可知,如(rú)果相鄰點(diǎn)之間i 或j 的方向發生變(biàn)化(huà),C角可(kě)能會發生劇烈變化。例如第n 點刀軸方向為 (0.100 0, –0.100 0, 0.989 9),第n+1 點的(de)刀軸方向為 (–0.100 0, –0.100 0, 0.989 9),直接依據式(3)計算出來的C角分別為3/ 4π 和−3/ 4π ,相距3/ 2π 。由(yóu)式 (4)~(7)可知,線(xiàn)性軸的取值與旋轉軸有關,C 角變化劇烈(liè)會導致線性軸變化劇烈(liè),從而產生(shēng)較大的誤差。因此需要(yào)對原(yuán)始的C 角進行修正。由於正弦(xián)函數和(hé)餘弦函數都以2π 為周期,因此利用這一特性在反解三角(jiǎo)函數(shù)的過程中修改C 角的取值
式中 n 1 γ + ′ ——修改後的第n+1 點的C 角取值n 1 γ + ——修改前的第n+1 點的C 角取值n γ ——修改前的第n 點的(de)C 角取值經過這樣(yàng)處理後,加工路徑(jìng)上Δγ ( n 1 n γ γ + − )都(dōu)不超(chāo)過π ,過大轉角得到初步(bù)控製。對於(yú)AC 雙轉(zhuǎn)台五軸機床來說(shuō),C 軸對線性軸的影響大,A 軸(zhóu)較小[11]。因此隻需(xū)要對(duì)C 角進行優化即可。
2 奇(qí)異區域內的優化方法
2.1 奇異點和奇異區域
由圖1 可知,當α=0 時,刀軸與轉台台麵垂(chuí)直, C 角取任何值刀軸方向都不會改變,造成自由度丟失。根據式(2)~(3)也可以看到,α=0 時,刀具方向矢量為 (0,0,1),此時γ = arctan(0 / 0) ,無解,在(zài)Matlab 中規定為0。對於AC 雙轉(zhuǎn)台機床,刀軸方(fāng)向為(0,0,1) 的點就是奇異點。盡管在反運(yùn)動學變(biàn)換過(guò)程中修正了C 角的取值,但(dàn)是如果刀具經過奇異(yì)點附近即(jí)奇異區域時,Δγ 仍然很大,甚至可(kě)能達到π 。刀具(jù)進入奇異(yì)區域後,越接近奇異點,C 角變化越劇烈,由此產生的非線性誤差越顯著,對工件和刀具可能造成的損害也越(yuè)大。需指出的是,刀具經過奇異區域並不一定會經過奇(qí)異點,而經過奇異點就一定是經過了奇異區(qū)域。
對於奇異區域的(de)範圍,可以采用基於機床雅可比矩陣條(tiáo)件數(shù)的(de)方法來界定:首(shǒu)先根據機床的運動學方程和相鄰點各(gè)軸運動變化(huà)量建立五軸機床雅可比矩陣,然後求解雅(yǎ)可比矩陣的條件數,如果條件數超過給(gěi)定(dìng)值,則可以(yǐ)判定當前加工區間處於奇異區域內[12]。
2.2 奇(qí)異點(diǎn)及其(qí)附近的C 角處理(lǐ)
造成奇異(yì)區域內(nèi)非線性誤差過大(dà)的原因一般有(yǒu)兩個:一是因為奇異點處i 和j 均為0,造成C角值不能確定(dìng);二是因為奇異點前後兩點的i 或(huò)j可能會發生變號造成的。下麵分別就這兩種情況(kuàng)給出處理方法。
2.2.1 第一種情況
對於第(dì)一種情況,由於當刀具在奇異點位(wèi)置時,刀軸與轉台台麵垂直,C 角無論取何(hé)值都不會影響該點的刀軸方向,因此可以指定這一點(diǎn)的C 角值。設指定(dìng)後的C 角值為γ ′ ,奇異點前後兩點的C角值分別為1 γ 和2 γ 。設定的C 角值要使1 γ ,γ ′ , 2 γ波動(dòng)最小,需(xū)要(yào)三者方差最(zuì)小。奇異點處C 角設定方法如下
這樣,奇異點左(zuǒ)右兩個區間的Δγ 都不超過π/2,過大(dà)的(de)Δγ 有(yǒu)效降低。表2 給出一處奇異點附近的刀位(wèi)數據。表3 是(shì)對應的機床各軸運動坐標數據。
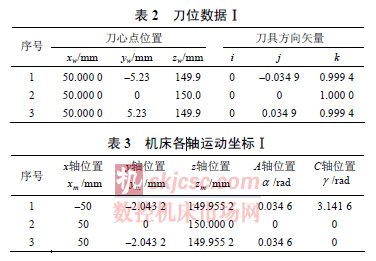
刀具從第1 點走到第3 點,C 角一共(gòng)變化了π ,但由於第2 點和第1 點之間的Δγ = π ,所(suǒ)以導致這兩點之間的(de)路徑呈現為一個很大的弧。按照上述方(fāng)法對奇異點(diǎn)處C 角進行設定。之後根據設定的角度修改x,y,z 軸的取(qǔ)值。
表4 給出奇異(yì)點處C 角設定後的機床各(gè)軸運動坐標。
可知,盡管處理後z 軸方向比原先(xiān)增加了0.3mm 左右的誤差,但是卻(què)使(shǐ)x 軸方向的誤差減小了大約40 mm,y 軸方向(xiàng)的(de)誤差減小(xiǎo)了大約20 mm。整體誤差(chà)大大降低。
2.2.2 第二種情況
第二種情況是奇異點(diǎn)附近可能會(huì)存在軸對稱的點,即位置坐標和方向矢量都關於三(sān)維空間某一坐標(biāo)軸對稱。對AC 機床來說,對(duì)稱的兩點z 軸坐(zuò)標總(zǒng)是相同的,因此(cǐ)隻需要研(yán)究Oxy 平麵上(shàng)投影的情況。若方向矢量的投影關於y 軸對稱,則i 絕對值(zhí)相同,符號(hào)相反;若(ruò)方向矢量的投影關於x 軸對稱的兩點,則j 絕對值相同,符號相反。這樣,相(xiàng)鄰兩點的(de)C 角就可能相差超過(guò)π/2 。圖3 所示為一種(zhǒng)奇(qí)異點附近(jìn)的對(duì)稱情況。
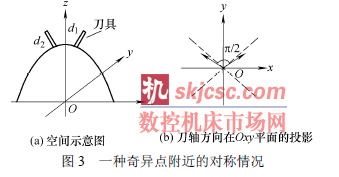
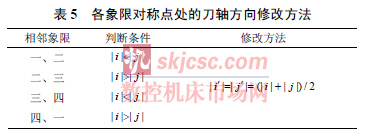
以C 角從第一象限轉到第(dì)二象限為(wéi)例(lì)說明。當i ≥ 0且j>0 時,C 角在第一象限,設此時γ =θ 。若i 不變,j 變號,C角轉到第二象限,此時的(de)γ = π −θ 。C角的變化量Δγ = π −θ −θ = π − 2θ 。當| i |≥| j |時,π/4 ≤θ < π/2 , 0 < Δγ ≤ π/2 ; 當| i |<| j | 時, 0 <θ < π/4,π/2 < Δγ ≤ π。因此,當C角(jiǎo)從第一象限轉到(dào)第二象限時, 若| i |<| j | , 令| i′ |=| j′ |= (| i | + | j |) / 2,就可以保(bǎo)證旋轉不超過(guò)π/2 ,其中i′ 和j′ 分(fèn)別表示修改後刀(dāo)軸方向矢量在工件坐(zuò)標係的x 軸和y 軸(zhóu)方向的分量。
同理可得出其他象限的情況,如表5 所示.
需要說明(míng)的是,如果兩點不是軸對(duì)稱,而是中(zhōng)心對稱,則上述方法無法將Δγ 控製到π/2以內,這時隻能通過插值法進行處理。
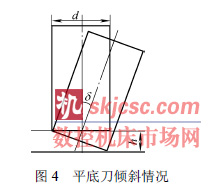
盡管傾斜刀(dāo)具可以調整C 角,從而(ér)降低非(fēi)線性誤差,但同時也會帶來過切和欠切誤差。下麵(miàn)通過比較二者的誤差大(dà)小來證明傾斜刀軸的有效性。以平底刀為例。設刀具直徑為d,刀具傾斜角為(wéi)δ ,由此產生的過切和欠切誤差為h。
易知
h = d sinδ (9)
設原來(lái)的刀軸(zhóu)方向矢量為a ,修改後的刀軸方向矢量為b ,則sinδ = (| a × b |) /(| a |i| b |) 。由於| a |=| b |=1,所以sinδ =| a × b |。
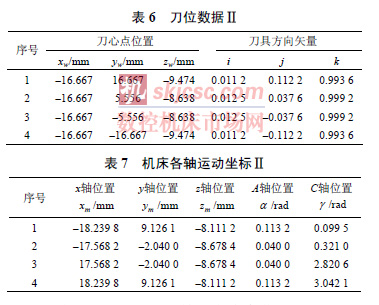
令(lìng)| k |= 0.995 0 時刀具進(jìn)入奇(qí)異區域,可知0 ≤| i |≤ 0.099 9,0 ≤| j |≤ 0.099 9 。下麵分析刀具從第(dì)一象限進入第二象限的情況,其他情況同理。當前一點刀軸矢量為(0, 0.099 9, 0.995 0),後一點刀軸矢量為(0, –0.099 9, 0.995 0)時,Δγ = π,變化量最大。根據上麵方法對前後兩點分別進行修改。前一點為(wéi)(0.05, 0.05, 0.997 5),後一點為(0.05, –0.05, 0.997 5)。sinα = 0.070 5。若平底刀直徑取6 mm,則過切和欠切誤差(chà)h=0.423 mm。也就是說,對於直徑6 mm 的平底刀,修改刀軸方向引入的最大過切和欠切誤差為0.423 mm,而過大的C 角由π 降到(dào)π/2 ,由此降低(dī)的非(fēi)線性誤差遠大於新引入的過切和欠切(qiē)誤差。因此在奇異點附近傾斜刀軸是有效的(de)。表6 給出(chū)一處奇異點(diǎn)附近的刀位數據。表7 是對應的機床各軸運動坐標。
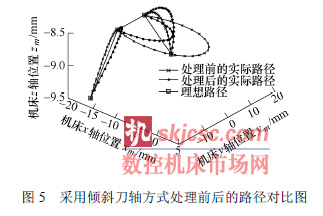
由表4 可見,由於j 符號發生變化,且| i |<| j |,第2 點和第3 點間的C 角變化超過π/2 。同時看到第1 點(diǎn)與第2 點以及而第3 點與第4 點間的變化很小,因此(cǐ)可以(yǐ)考(kǎo)慮修改第2 點和第(dì)3 點(diǎn)處的刀軸(zhóu)方向,適當增加其他兩個區間的C 角(jiǎo)變化量,來降低奇異點(diǎn)附近的過大C 軸轉動(dòng)8 為修改後的刀位數據。表9 為對應的(de)機床各軸運動坐標。
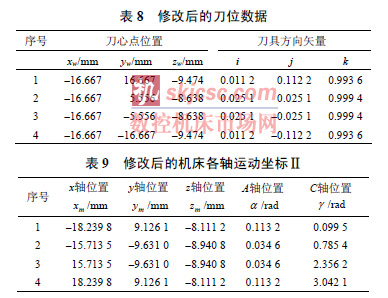
圖5 是傾斜刀軸前後的(de)路(lù)徑對比圖。4 個點的C 角方差由修改前的2.484 5 降到1.854 4,波動變小。最大非線性誤差由16.680 8 mm 降到8.810 4mm,平均誤差也由6.075 5 mm 降到4.903 3 mm。使(shǐ)用直徑6 mm 的平底刀,傾斜刀軸(zhóu)所引入的過切和欠切誤差僅為0.106 8 mm。由(yóu)此可(kě)見,整體誤差大大降低(dī)。
2.3 遞歸插點
經過以上處理後,大部分Δγ 都降到π/2以下(除非存在中心對稱的刀位點)。如果還需要進一步提高加工精度,則通過插點對加(jiā)工路徑(jìng)進行線性化。
設相鄰兩個刀位點為(wéi)( w, w ) p′ u′ 和( w, w ) p′′ u′′ 。設實際加工路徑的中點(diǎn)與編程直線的中點之間的距(jù)離(lí)為r 。最大允許誤差為ω 。若r >ω ,在相鄰刀位點中點處插入新的刀位點( pw,uw ),然後檢查( w, w ) p′ u′ 與 ( pw,uw )之間、( pw,uw )與(yǔ)( w, w ) p′′ u′′ 之間的非線性誤差是否超過ω 。如此遞歸進行,直到r ≤ω 。
插入新(xīn)刀位(wèi)點時將刀具的位姿同(tóng)旋轉軸的轉角結合起來考慮,具體(tǐ)方法如下:設(α0 ,γ 0 ) 和 (α1,γ 1)分別(bié)為刀位點( w, w ) p′ u′ 與( w, w ) p′′ u′′ 所對應的旋轉軸轉角坐標。首先,計算(α0 ,γ 0 )和(hé)(α1,γ 1)的中值對應的方向矢量w u ,然後求(qiú)w ′p 與wp′′的中(zhōng)值pw,最後將pw與uw組(zǔ)成(chéng)新刀位點( pw,uw )。若直(zhí)接令w ( w w ) / 2 p = p′ + p′′ ,再用式(2)和式(3)求解中點處的α 、γ ,則不(bú)能有效降低誤差,原因是奇異區域內(nèi)分量i 和(hé)j 接近0,造成C 角值偏差很大。
2.4 整體優化流程
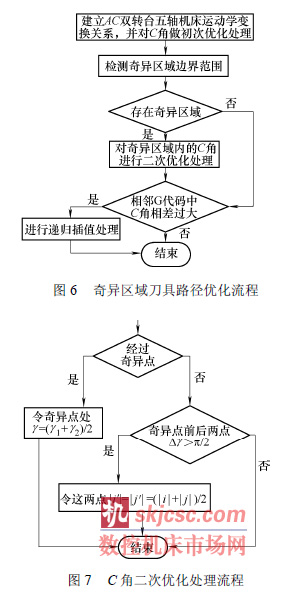
綜上所述,奇異區域的優化處理流(liú)程如圖6 和(hé)圖7 所示。
3 加工試驗
下麵通過仿真(zhēn)試驗和實際加工對上文給出的算法進行驗(yàn)證。選擇直徑6 mm 的球(qiú)頭刀進行加工。加工曲麵S(u,v)的(de)參數方程如式(10)所示
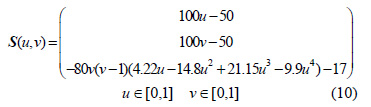
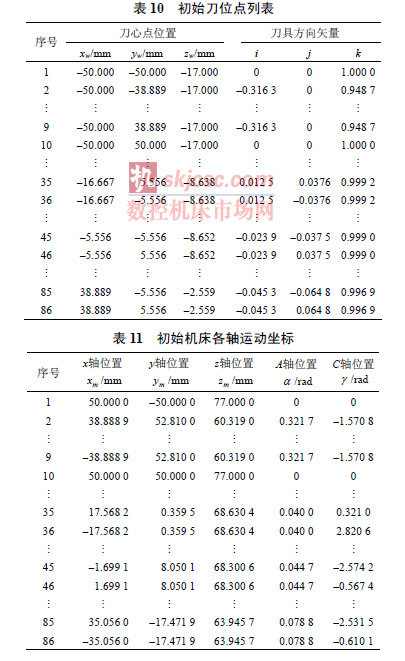
式中,u, v 為曲麵方程的參數。表(biǎo)10、11 給出初始刀位點和(hé)初始機床各軸運動坐標。可以看到奇異點附近的兩種情況所(suǒ)導致的C 軸過大偏轉。
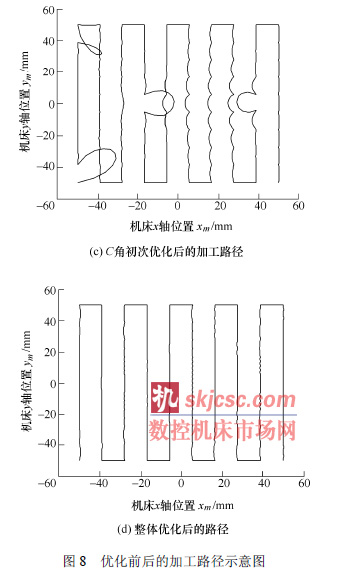
圖(tú)8 所示是所給加工曲麵的Matlab 仿真效果圖。經過對(duì)C 角初步優化後,過大的環形軌跡得到初步控製,再通(tōng)過二次優化和插值(zhí)處(chù)理,得到的路徑(jìng)與理想路徑基本接近。

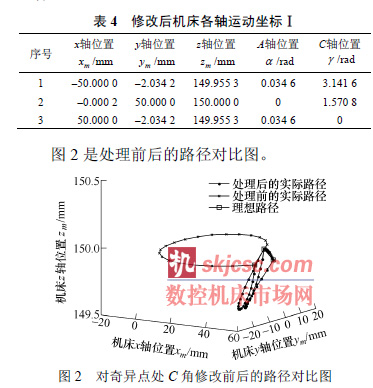
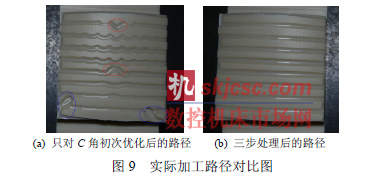
實際加工的(de)路徑對比如圖9 所示。圖9a 實線(xiàn)圈出的是(shì)奇異(yì)區域內的(de)過大(dà)環狀軌跡,其中靠下麵的兩個(gè)是(shì)第一種情況,靠上麵(miàn)的兩個是(shì)第二種情況。可以看到,處(chù)理後加工路徑更加平滑,加工精度(dù)大大提高,實際的加(jiā)工情況與理論分析結果一致。需要說明(míng)的是,由於過大環形軌跡會對刀具造成損害,因此未對圖8b 所示的情況進行實際加工。采用直接插點法,需插入737 個點才能將(jiāng)最大非線性誤差降到0.099 8 mm。而(ér)采用綜合方法處理時,新插入點304 個,最大非線性(xìng)誤(wù)差0.098 4 mm,速度是直接插(chā)點法的二(èr)倍。
4 結論
(1) 本文在對奇異區域內(nèi)五軸加工過程的處理上,根據相鄰點C 角變化量大小,依次進行C 角的初次優化、C 角的二次優化、加工路徑線性化處理。盡管這個過程會引入新(xīn)的(de)過切和欠切誤差(chà),並且(qiě)為了(le)降低某一個區間的過大(dà)誤差(chà)而增加了其他區間的(de)誤差,但是整體的誤差得到了有效控製,同(tóng)時增加的誤差也在允許範圍內。
(2) 這種處理方(fāng)式既保證了奇異區域內的加工精度,有效地保護了工(gōng)件和(hé)機床部(bù)件,又盡可能地(dì)減少了插點的數量,使奇異區域內(nèi)的加工速度盡量提高。
如果您有機床行業、企業相關新聞稿(gǎo)件發表,或進行資訊合作,歡(huān)迎(yíng)聯係本網編輯部, 郵箱:skjcsc@vip.sina.com






州金馬")

