摘(zhāi)要: 由於鐵路客車軸承滾子磨削加工精度難(nán)以控製,介紹(shào)了一種采用CBN 砂輪高速點(diǎn)接觸磨削滾子的新方法,重點對其在線檢測(cè)係統做了深入的(de)研究。確定(dìng)了在線檢測係統的總體方案,設計了測頭機(jī)構,闡述並分析了(le)測(cè)量原理。
關鍵詞: 滾動軸承; 滾子(zǐ); 精密磨削; 在線檢測
1 前言
隨著列車速度(dù)的提高和運行距離的增加,對(duì)車輪軸承質量的要求也隨之提高[1]。目前,國內鐵路客車正常運行速度不超過160 km/h,車輪最(zuì)高轉速為1 000 r /min,車軸所受(shòu)載荷為148. 96kN,最(zuì)大軸向載荷為59. 6 ~ 74. 5 kN,車輪軸承采用脂(zhī)潤滑。滾子質量在(zài)很大程度上(shàng)影響著(zhe)軸(zhóu)承(chéng)的使(shǐ)用壽命和動態性能。由(yóu)於鐵路客車使用環境的特殊(shū)性,要求(qiú)在磨削(xuē)加工中同一組滾(gǔn)子直徑變動量≤2 μm,長度變動量≤10 μm。
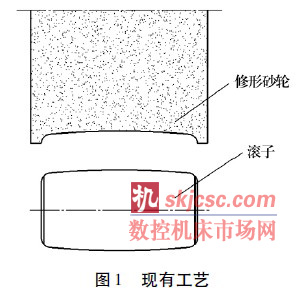
磨削加工往往作為終加工工序,對工件(jiàn)的最終精度有直接的影(yǐng)響。鐵路客車常用軸承有圓柱滾子軸承和圓(yuán)錐滾子軸承,滾子素線常(cháng)采(cǎi)用邊緣對數曲線(xiàn)修形(xíng),一(yī)般為修形砂輪切入式磨削加工,其原理如圖1 所示。這種加工方(fāng)法要經常用金剛(gāng)筆或金剛滾(gǔn)輪對砂輪進(jìn)行(háng)修形,修形後的砂輪外形很難保證與所需滾子外(wài)形素線一致,同一批滾子的直徑變動量難以控製,容易造成滾(gǔn)子(zǐ)滾動麵素線的對稱度不高,表麵粗糙度控製有限,且頻繁修形造成工作效率較低。
針對現有技術的不足,設計了一種采用CBN砂輪高速點接觸(chù)磨削滾子軌跡的新方法。該(gāi)方法集(jí)多種輪廓磨削加工工藝於一體,一次裝夾可完成多個表麵的磨(mó)削加工,不僅(jǐn)提高加工效率,還可以保(bǎo)證工件的形(xíng)狀和(hé)位置精度。
在線(xiàn)檢測技術是一種基於計算機控製的檢測技術,其(qí)檢測(cè)過程(chéng)由數控程序控製,通過工控機的(de)處理(lǐ)得出檢測結果並做出相應的處理。將在線檢測技術應用(yòng)於鐵路軸承滾子的磨削加工中,可減少(shǎo)工件裝夾次數,有效保證工件的重複(fù)定位精度,對提高滾子質量將有著質的變化。因此,研(yán)究設計了與上述磨削加工方法有機結(jié)合的在線檢測係統。
2 總體(tǐ)方案
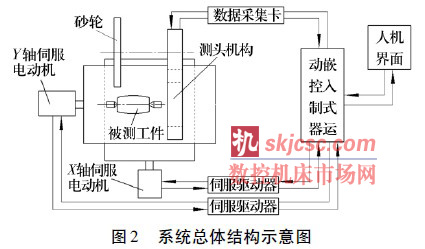
軸(zhóu)承(chéng)滾子精密磨削機床在線檢測(cè)係統由雷尼紹測頭係(xì)統和相應的檢測軟件結(jié)合機床本體構成。係(xì)統借助機床上(shàng)的(de)部分硬件,在不改變機床本身性能的基礎上,加(jiā)入三坐標測量機的主要功(gōng)能(néng),實現在線檢測和反(fǎn)饋控製[3],總體方案如圖2所示(shì)。該係統由雷尼紹測頭(tóu),嵌入式運動控製(zhì)器(qì),人機界麵,X 軸、Y 軸伺服電動機及伺(sì)服驅動器等相關部件組成。係統工作時,在X 軸、Y 軸伺服電動機的配(pèi)合下(xià),工件與測頭測針接觸產生觸(chù)發信號。信號(hào)經處理後由專用I /O 接口傳輸給嵌入式運動控(kòng)製器,測量(liàng)軟件結合同時反饋回的伺服電動機的位置信息,進行計算、補(bǔ)償(cháng)等數據處(chù)理工(gōng)作,得出檢測結果,完成檢測工作。
3 測頭(tóu)機構
在線檢測係統的測頭機構主要由測頭座和(hé)2個(gè)雷尼紹LP2 測頭構成,LP2 測頭固定在測頭座上,其結構如圖3 所(suǒ)示
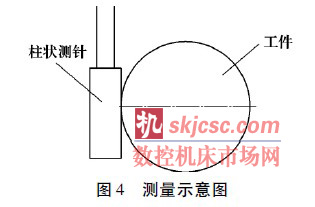
測針(zhēn)是(shì)LP2 測頭的重要組成部分,在線測量過程中與工件接(jiē)觸,對在線測量的完成和準確與否起著關鍵(jiàn)性的作用。測針通常分為球狀測針和柱狀測針。本在線檢測的實(shí)質是取得工件各縱截麵(miàn)的最大直徑值。如果選(xuǎn)擇球狀測(cè)針,測針與工件的接觸實際上是空間內點(diǎn)與線的(de)接觸,測量時測針接觸點所在的水平麵(miàn)與工件中心線所在的水平麵(miàn)很難(nán)重合(hé),實際測量值將小於測量截麵(miàn)處工(gōng)件的最大直徑,將不可避免(miǎn)地產生誤差; 而采用柱狀(zhuàng)測針時(shí)測針與(yǔ)工件(jiàn)的接(jiē)觸實際上為空間內兩條直線之間相交,由空間內兩條不重合的直線相交隻有一個交點可知,測(cè)量時測針與工件之間的接觸(chù)點與工件水平(píng)中心線重合,可避免產生誤差,測量(liàng)示意圖如圖4 所示。
4 檢測(cè)原理
4. 1 工件坐標係的建立
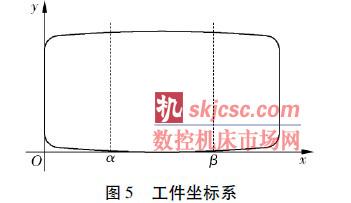
在線(xiàn)檢測係統的作用(yòng)是在機床磨削滾子後(hòu),對磨削後滾子的縱向截麵直徑進行(háng)在線測量並將測量結果反饋給控製中(zhōng)心。在此,以一種(zhǒng)滾動麵素線中間為圓弧曲線,兩端為對數曲線修形的滾子(zǐ)為例(lì)闡述測量原理。設滾子最大直(zhí)徑為(wéi)Φm,有效接(jiē)觸長度為L,滾動麵圓弧部分素線的半徑(jìng)為(wéi)R,對數修形部分素線的方(fāng)程為y = aln[1 - ( 2x /L) 2]- 1 ( 其中a 為根據工況和材料性質決定的常數(shù)) 。測(cè)量時,工件固定在機床上的兩個頂尖之間,所建立的工件坐標(biāo)係如圖5 所示,其中α,β 點為圓弧曲線與對數曲線的(de)切點。
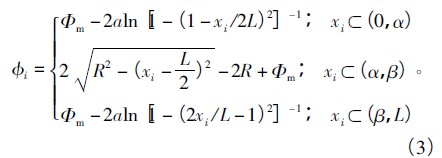
在工件坐標(biāo)係(xì)中,α 與β 點所在的截麵的直徑分別為
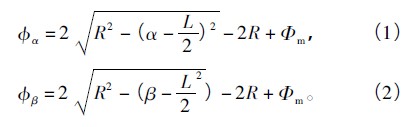
其餘任意一點xi所在的截麵的直徑φi為
4. 2 測量(liàng)過程及原理
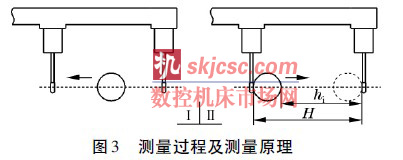
測量過程及原理示意圖如圖3 所示(shì)。在線檢測時,測頭機構不動,被測工件與所在的工(gōng)作台一起在X 軸、Y 軸電動機的配合下運動(dòng)。當(dāng)係統測量(liàng)工(gōng)件xi點所在截麵的直徑時(shí),X 軸伺服電(diàn)動機拖動縱向托板向(xiàng)前(qián)運動,當(dāng)測針與工件接觸後,測頭產生(shēng)一個觸發(fā)信號經(jīng)傳輸器(qì)傳送(sòng)到(dào)運動控製器中,控製X 軸伺服電動機反方向(xiàng)( 即向後(hòu)) 運動(dòng),並記錄下此時X 軸伺服(fú)電動機的位置(zhì)。當工件(jiàn)與第2 個測針接觸時,測頭再次產生一個觸發信號(hào)傳送給運動控(kòng)製器,控製X 軸伺服電動機反方向運動至(zhì)開始檢測位置( 即工件處於兩(liǎng)個測針正中間的位置) ,同時記錄下此時X 軸的位置。2 個(gè)觸發信(xìn)號之間X 軸電動機拖動(dòng)托板運動的距離為hi,事先標定好的2 個測針之間的距(jù)離為H,則xi點所在的截麵的直徑Φi為
![]()
則xi點所在截麵的直徑的實際測(cè)量值與(yǔ)理論值之間的差值為(wéi)Ci = Φi - Φi,該差值將(jiāng)作為機床下一步工作(zuò)的重要依(yī)據。
5 檢測程序
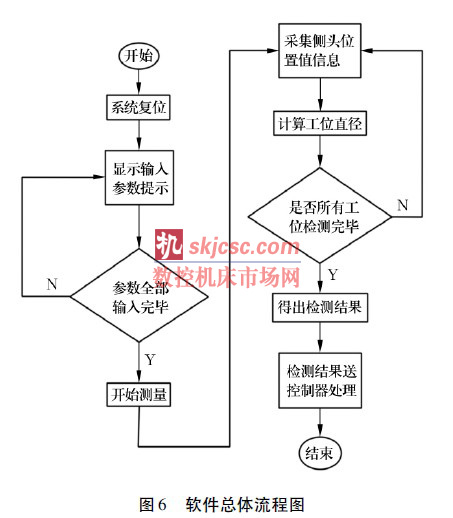
在線檢測技術能否準確(què)實現的關(guān)鍵主要(yào)體現在檢測程序的編製上,檢測程序編製質量直(zhí)接影(yǐng)響到檢測效果的好壞[4]。根據雷尼紹廠商提供的工(gōng)具測量軟(ruǎn)件,結合深(shēn)圳固高公司的運動控製器編程語法,在Windows XP 操作環境下運用VC + +開發了專用的測量軟件(jiàn)。該測量程序采用模塊化結構設計,主(zhǔ)要包括數據采集模塊、通(tōng)信模塊、顯示模塊、數據處理模塊和鍵盤中(zhōng)斷子程序等(děng)。軟件總流程圖如圖6 所示。
基於固(gù)高運動(dòng)控製器編程語法的檢測(cè)子程序部分程序段如下:
#CETOU 標號
SP 2000 初始速度
BGY Y 軸運動
AI 1 1#停(tíng)止脈衝
APY < return > 查(chá)詢並報告Y 軸位置
PRY - 2000 Y 軸反向運動(dòng)
AI 2 2#停止脈衝
APY < return > 查詢並(bìng)報告Y 軸位置
……
EN 結束
6 結束語
目(mù)前,上述滾子(zǐ)磨削加工機床已完成了論證和(hé)設計工作,正處於樣機的生產和調試階段(duàn)。若能實現數(shù)控軸承滾子磨(mó)床加工過程的在線檢測,將減少(shǎo)工件的裝夾次數,既能保證磨(mó)削加工的精度,又可擴大數控磨削機床的功能,改善機床的性能及工作效率(lǜ),降低工(gōng)人的勞動(dòng)強度,對提高(gāo)國產鐵路(lù)軸承滾子的整體品(pǐn)質也有一定的現實意義。
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯係本網編輯部, 郵箱:skjcsc@vip.sina.com








