高速電主軸滾(gǔn)珠軸承-轉子係統 動態性(xìng)能分析
2016-8-17 來源: 哈爾濱工(gōng)業大學 作者:張阿祺
電主軸轉子-軸承係統的動態性能研究的主要(yào)內(nèi)容是分析轉子-軸承係統的固有頻率、臨界轉速和振動響應。不平衡響應是高速電主軸轉子-軸承係統振動的主要表現之一(yī),它主要是由轉子軸端不平衡質量(liàng)產生離心力所產生的,並(bìng)受(shòu)係統的(de)其他因素影響。
影響轉子(zǐ)-軸承係(xì)統動態性能的因(yīn)素很多,比如軸向預載荷、軸向外載荷(hé)和徑向外載荷、球軸承滾動體的數量及直徑(jìng)、球滾動體(tǐ)的材料、初始設(shè)計接觸角、套圈的滾道曲率半徑、主軸係統的轉速(sù)等對角(jiǎo)接觸球軸承的動剛度產生比較大的影響,進而影響係統的動態性能,屬於影響(xiǎng)球軸承動剛度間接影響係統性能。此外,還有主軸(zhóu)上的許(xǔ)多(duō)影響因素,比如電主軸(zhóu)空心轉子內孔直徑、軸承之間的支(zhī)承跨距、軸承的配置(zhì)形式、軸承的數量、內(nèi)裝(zhuāng)電機轉子的外徑、內裝(zhuāng)電機轉動長度(dù)、主軸軸端不平衡質量、轉子的外(wài)伸長度等因素。因而,球軸承支承的轉子係(xì)統的動態性能分(fèn)析是非常複雜的,通過分析各個因(yīn)素相互影響、交錯(cuò)迭代得到相關數據。本章主要分析轉速、軸(zhóu)端不平衡質量、預載荷、軸承支承跨距、轉子外伸長度等對轉子-軸承係統的動態性能產(chǎn)生的影響。
4.1、電主軸滾動(dòng)軸承-轉子動力學係統模(mó)型
如圖 4-1 中對電主軸的轉子部分進行離散化處理,建立滾動軸承-轉子係統的有限元動力學(xué)模型,將主軸劃分為 N 個節點、(N-1)個單元。利用有(yǒu)限元(yuán)基本(běn)理論以及高速電主軸滾軸軸承-轉子係統的受力變形特點,將電主軸主軸單元視為梁類零件的橫向彎曲(qǔ)振(zhèn)動模型為(wéi)基礎,建立有限元模型。根據(jù)有限元劃分基本原則將主軸轉子劃分為 N=22 節點,21 個單元,並將質量集中於每個單元的(de)兩個節(jiē)點上。
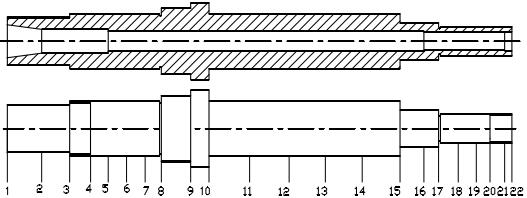
圖 4-1 轉子有限元劃分圖
4.2、轉子-軸承係統的運動微(wēi)分方程的分(fèn)析(xī)
一般(bān)旋轉機械的(de)轉子係統是根據梁的(de)橫(héng)向(xiàng)彎(wān)曲振動,高速電主軸潤滑性能很好忽略其阻尼作用(yòng),高速電主軸轉子(zǐ)-軸承係統也采用(yòng)通用的微(wēi)分方程方程式表示:
XM+KX=F (4-1)
式中 K ——總體剛度矩陣;
M ——總體質(zhì)量(liàng)矩陣;
F ——總體外載(zǎi)荷列向量;
X ——總體(tǐ)位移向量(liàng)。
4.2.1 單元剛度矩陣及總體剛(gāng)度矩陣
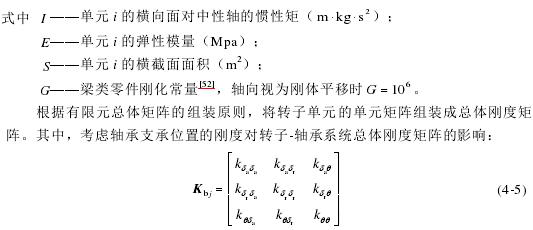
考慮軸向位移(yí)的梁類零件的有限元分析,視電主軸振動模型為(wéi)梁類零件的橫(héng)向彎曲振動模型,其 i 單元的(de)單元(yuán)剛度矩陣為:
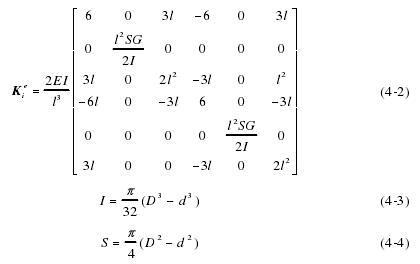
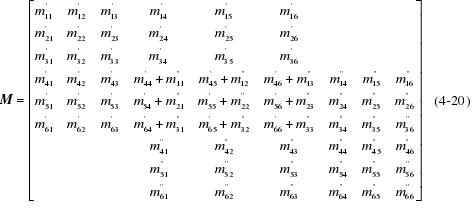
在總體剛度矩陣相應元素中按對號入座方法疊加入上式主軸軸承支承剛度矩陣,即可得到整個轉子-軸承係統 3N 階實對稱總體剛度(dù)矩陣:
如圖(tú) 4-2 為簡化模型,對於節點(diǎn) N=3 的轉子-軸承係統,有 2 個單元,按照有限元方法的剛度矩陣求(qiú)法(fǎ)不難表示出矩陣的形式,兩(liǎng)個(gè)梁單元的剛度(dù)矩陣最終可分別表(biǎo)示為:
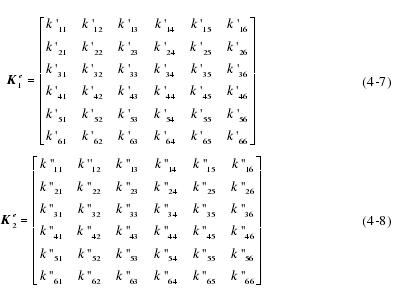
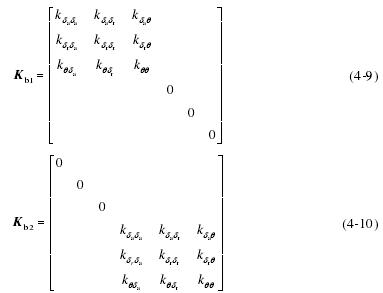
在節點(diǎn) 1 和節點 3 處各有(yǒu)一套角接觸球軸承,其對應的單元 1 和單元 2 的軸承支承(chéng)剛度分別為:
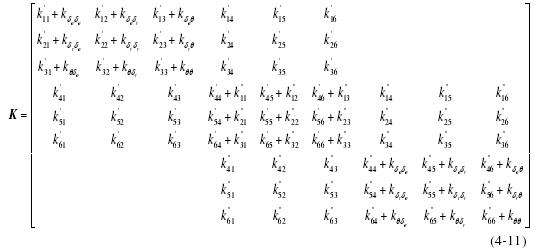
應用有限元的對號入座法,將軸承的動剛(gāng)度組裝入係統的總體剛度矩陣中,可得最(zuì)終轉子(zǐ)係統的總體剛度矩陣為:
4.2.2 單元質量(liàng)矩陣及總體質量矩陣
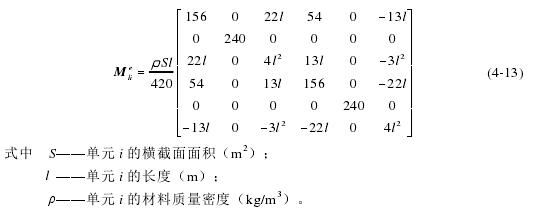
按照集中質量法,將單(dān)元的質量集中(zhōng)到兩個端麵,單元內部的質量為零,並按照質量守恒可以得出單元質(zhì)量矩陣,梁單元總質量矩陣為實對稱 6 階矩陣,公式可表示為:
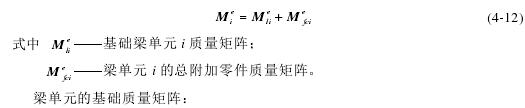
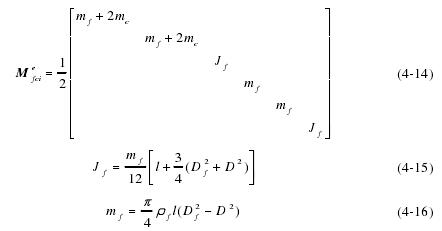
總附加(jiā)零(líng)件質量矩陣包括大質量塊(kuài)矩(jǔ)陣和空心軸筒的質量矩(jǔ)陣,大質(zhì)量塊可將其質量集中為 mc,空心軸筒可將質量集中於兩端,則單(dān)元 i 上(shàng)的(de)總附加零件質量矩陣為:
與前麵係統總體剛度矩陣的組裝方式類似,轉子-軸承係(xì)統的總體質量矩陣為:

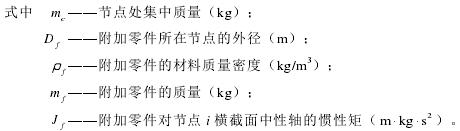
同樣,對於 N=3 的轉(zhuǎn)子-軸承係統,有 2 個單元,則兩個梁單元的總質量矩陣可分別表示為(wéi):
在 M1和(hé) M2自身中已(yǐ)包含基礎梁單元質量矩(jǔ)陣和附加零(líng)件質量,應用有限(xiàn)元對(duì)號入座法可得轉子係統的(de)總體質量矩陣為:
4.2.3 係統總載荷向量和係統總位移向量
高速電主軸(zhóu)采用角接觸球軸承,有外力作用(yòng)對軸承的剛度、係統的剛度和動態性能都有一定的影響。圖 4-2 為梁結(jié)構受力示意圖,其中 D為單元 i 的外徑,d為(wéi)單元 i的直徑,l 為單元長度;虛線為空心部分,打斜線部分為軸上(shàng)附(fù)加零件其外徑為 Df。
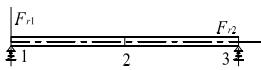
圖 4-2 兩個單元的梁結構受力示意圖
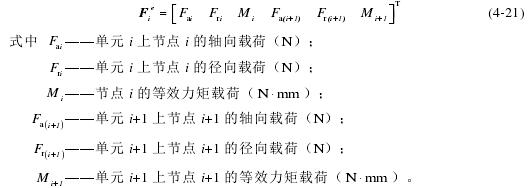
根據有限元法,單元兩端 i 和(hé) i+1 節點作用有等效外載荷,並產生相應軸向位移,單元 i 外(wài)載荷列向量可表示為:
根據對號入座原(yuán)則將轉子係(xì)統所有單元的載荷列向量組裝合(hé)成係(xì)統總載荷向量,從而可得:
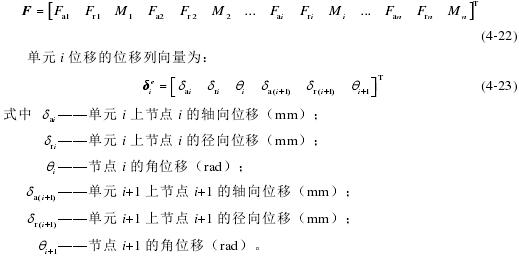
同樣(yàng),根據對號入座原則將轉子係統(tǒng)所有單元的位移列向(xiàng)量組裝(zhuāng)合成係統總(zǒng)位移(yí)向量,從而可得:
4.2.4 係統運動微分(fèn)方(fāng)程和自由振動微分方(fāng)程
根據上述分析,可得包括主軸軸承動剛度在內的高速電主(zhǔ)軸轉子-軸(zhóu)承係統的有限元運動(dòng)微分方程和自由振動(dòng)微分方程可表示為(wéi):
M X+KX=F(4-25)
M X+KX=0(4-26)
式中 K——係統總剛度矩陣式;
M——係統總(zǒng)質量矩陣式;
F——係統(tǒng)總載荷矩陣式;
X——係統總位(wèi)移向量式。
4.3、係統運動微分方程的求解
4.3.1 轉子-軸承係統的固有頻率(lǜ)和臨界轉速
為確保高速電主軸的工作轉速在安全範圍內,不發生(shēng)共(gòng)振,需要計算高(gāo)速電主軸轉子的臨界轉速。
彈性體的自由振動可以分解為一(yī)係列(liè)簡諧運(yùn)動的疊(dié)加(jiā),設自由振(zhèn)蕩的位移方程為:
表 4-1 GS 係列內圓(yuán)磨床用電主(zhǔ)軸角接觸球軸承-轉子係統的結(jié)構參數

表 4-2 軸承 B719000C 的主要結構參數

表 4-3 文 GS 係列電主軸提(tí)供係統動態性能參數

本文選用(yòng)上海博紅科工貿有限公司的 GS 係列的內圓表麵磨床電主軸為(wéi)基(jī)礎模型,所選用主軸軸承的鋼(gāng)球材料(liào)為 GCr15 軸承(chéng)材料鋼,主軸(zhóu)軸承的型號為 FAG軸承 B71900C-2RZ/HQ1,d=10 mm,D=22 mm,t=6 mm 的角接觸(chù)球軸承其物理性能參數為 μ=0.3,ρw=7.85×10-3 kg/mm3,Ew=2.1×105 MPa,其轉子-軸承係統的結構簡圖如圖 2-2 所示,其他係統結構性(xìng)能(néng)參數如(rú)表 4-1 所示,其中,L 為支承跨距,L1為外伸長度,Ld為內置電機長度(dù)。假設在轉子-軸承的不平衡響應分析中軸端節點 1處不平衡質量所產生的不平(píng)衡(héng)激振力的幅值為 A’=15.5 N,彈簧的預載為 70 N,軸承的主要結構參數如表 4-2 所示(shì),GS 係列電主軸提供的動態性能參數如圖 4-3 所示,最高工作轉速 n=150000 r/min。
4.3.2 轉子-軸承係統的不平衡響(xiǎng)應
電主軸在(zài)固有頻率範圍內,即在轉速接近轉(zhuǎn)子係統的(de)臨界轉速的附近區域內時,會發生共(gòng)振,產生劇烈振動。因此,分析振(zhèn)動響應是本文的主(zhǔ)要內容之一。
本(běn)文忽略電主軸內部產生的微弱不平衡響(xiǎng)應,假設軸端不平衡質量(liàng)為 '1m,不平衡力(lì)的大小可表示為:
將不平衡力 F‘1r和係統總載荷列向量 F 按照對(duì)號入座疊加(jiā),得到(dào)包括不平衡力(lì)的係統總載荷力(lì)向量 F’’。在整體外載的係統微分方程為:
可用無阻尼(ní)係統的振幅疊加法求解式(shì)(4-35),得到係統的不平衡響應。前麵由頻率方程求出係統的固有頻率 ωi和特征值、特征(zhēng)向(xiàng)量等。
振型(xíng)疊加法是一種利用固有頻率和振型求解係統不平衡(héng)響應的方法(fǎ)。其基本原理是:對係統(tǒng)自由(yóu)振動進行(háng)模分析,得到係統的固有頻率和固有振型及其模態矩陣,再(zài)利用(yòng)模態矩陣(zhèn)對係統方程進行解耦,將係統動力學方(fāng)程轉(zhuǎn)換為(wéi)各主坐標上的非耦(ǒu)合方程。
設係統的主振型為(wéi)iφ ,代入特征方程式(4-28):
對於的係(xì)統的振型模態矩陣為:
依次對剛度(dù)矩陣,質量矩(jǔ)陣,矢量力進行作坐標變換(huàn),使方程解耦。則係統的主剛度矩陣和主質量矩陣(zhèn)為:

由於模態矩陣為正交矩陣,因而其轉置矩陣等(děng)於逆矩陣,對初(chū)始條件和激振力作(zuò)變換:
結合式(4-35)、(4-38)、(4-39)、(5-42),將原方程解耦,最後得出解耦方程為:
求出係統在(zài)主坐標上的響應後再根據式(4-40)將主坐標響應(yīng)變換回原來的物理坐標的(de)響應:
4.3.3 係統運動微分方程的求解
(1)高速電主軸的轉子-軸承係(xì)統的運動微分方程是非線性方(fāng)程,由於軸承的動剛度會發生非線性變化,所以需要(yào)采(cǎi)用(yòng)數值分析中的迭代方法交互計算,反複迭(dié)代(dài)逐步逼近,最後(hòu)求解。係(xì)統動態性能的求(qiú)解依(yī)托於軸承動剛度等軸承動態性能的求解(jiě),先求(qiú)解出支承剛(gāng)度,然後再解決係(xì)統問題,這是求解本課題所研究問題的關(guān)鍵步驟(zhòu)。係統動力微分方程的求(qiú)解程序的主要流程圖如圖 4-4 所示。
(2)如(rú)表 4-4 所示,本文所計算的動態(tài)參數的結果與上海博紅科工貿有限公司有在(zài)誤(wù)差允許範圍內。
表 4-4 本文所求係統動態性能參數

(3)主軸支承軸承(chéng)的動力學狀態對係統(tǒng)的性能影響比較大,特別是動剛(gāng)度的影響,直(zhí)接關係著係統(tǒng)總剛度的變化。預載(zǎi)荷、轉速、軸端附加零件質量、轉(zhuǎn)子的支承跨距和轉子外伸長度等對係統性(xìng)能的影響較大。本文將通過對(duì)固有頻率、臨界轉速、軸端(duān)不平衡響(xiǎng)應等的影響因素進行(háng)分析,通過分析這些因素,為電主軸的結構設計,結(jié)構優化(huà)等(děng)提供參考數據和(hé)理論基礎(chǔ)。
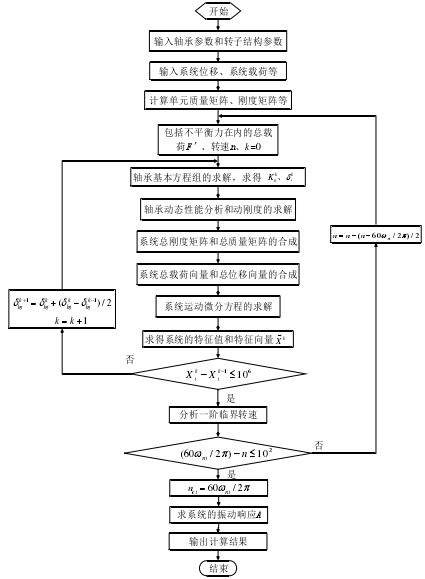
圖 4-4 轉子軸承係統動力學分析(xī)程序流程圖
4.4、 轉子-軸承係統動態性能的影響因素(sù)及其分析
4.4.1 固有(yǒu)頻(pín)率的影(yǐng)響因素及分析
軸向預載荷、軸向外載荷和徑向外載荷、球(qiú)軸承滾動體的(de)數量及直徑、球滾動體的材料、初始設計接觸角、套圈的滾道曲率半徑等影響因素對角接觸球軸承的動(dòng)剛度產生比較大的影(yǐng)響,進而影響係統的(de)動態(tài)性能。還有主軸上的許多影響(xiǎng)因素,比如電主軸空心轉子內孔直徑、軸承之間的支承跨(kuà)距、軸承的配置形式、軸承的數量、內裝電機轉子的外徑(jìng)、內裝電機轉(zhuǎn)動長度、主軸軸(zhóu)端不平衡質量、轉子的外伸長度等(děng)因素。因而,球軸承支承的轉子(zǐ)係統的動態性能分析是非常複雜的(de),通過分析各個因素相互影響、交錯(cuò)迭代得(dé)到相關數據(jù)。通過分(fèn)析這些因素(sù),從(cóng)而為電主(zhǔ)軸的結構設計,結(jié)構優化等參考數據和理論基礎。
(1)轉速對固有頻率情況由圖 4-5 給出,可以看出,中、低速或靜止時係統的固(gù)有頻率比高速時的固有頻(pín)率高出很多。在高速狀態(tài)下隨著轉速的增(zēng)加,係(xì)統的固有頻率會隨之下降,產生較大的變化,並且在相對較高速時,固有(yǒu)頻率會發生(shēng)反彈回升,但是幅度不大。
(2)機床(chuáng)電主軸軸端安(ān)裝有刀具等軸端不平衡質量,也需要添加砂輪等軸端附加零件,使得軸端附加零件質量增加並(bìng)且對軸承-轉(zhuǎn)子係統的動態性能產(chǎn)生較大(dà)的影響。如圖 4-6 給出的軸端附加質量對係統固有頻率的影響關(guān)係,基本和轉速對固有頻率的影(yǐng)響(xiǎng)效果(guǒ)一致,所以應該盡量減小軸端附加零件(jiàn)的質量,提高(gāo)係統性能。

圖 4-5 轉速與固有(yǒu)頻率的關係
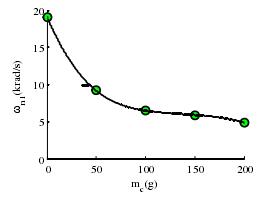
圖 4-6 軸端不平(píng)衡(héng)質量(liàng)與固有頻(pín)率的關係
(3)預載荷對球(qiú)軸承的剛度(dù)影響比較大,一定程度的預(yù)載(zǎi)荷對軸承的剛度和係統的性能有很大的提高。如圖 4-7 所示,隨著預載荷的增加,係統的固有頻率(lǜ)也在(zài)不斷的增加,但是增(zēng)加(jiā)的幅度(dù)越來越小,所以預載(zǎi)荷不能太大,太大了也沒有效(xiào)果,反而對軸承的壽命產生不利的(de)影響。
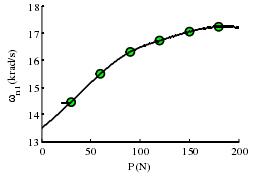
圖 4-7 預載荷與固有頻率的關係
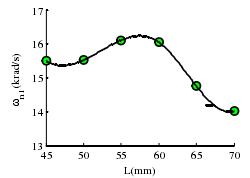
圖 4-8 軸承支(zhī)承跨距與固有頻率的關係
(4)軸承支承跨距和係統固有頻率的關係如圖 4-8 所示(shì),隨著支承跨距的增加,係統的固有頻率先增加後減小,在軸承支承跨距比(bǐ)較(jiào)小的(de)時候(hòu),軸承-轉子係統的固有頻率變化(huà)不大,此(cǐ)時跨距對係統性能的影響比較小(xiǎo),當跨距增(zēng)加到一定程度時,係(xì)統的固有頻率較快的增加再快速的減小,從圖上可以看(kàn)出存在一個最優跨(kuà)距值,此值為圖形峰值,這是電主軸設計優化時需要考(kǎo)慮(lǜ)的。而在峰值以後(hòu)也就是在較大跨(kuà)距時跨距對係統固有頻率(lǜ)的影(yǐng)響(xiǎng)越來越明顯。
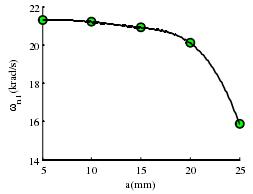
圖 4-9 轉(zhuǎn)子外伸長度與固有頻率的關係
(5)如圖 4-9 所示,主軸的外伸(shēn)長度越大,係統的固有頻率在不斷的減小,外伸長度較小時下降得(dé)不明顯,當外伸長度越來越(yuè)大(dà)的時候,係統的固有頻率呈現明顯的下降趨勢,影(yǐng)響程度非常大(dà)。所(suǒ)以出於電主軸性能(néng)方麵的(de)考慮,較小的轉子外伸長度時係統(tǒng)固有(yǒu)頻率可以有比較大的值,係統的(de)性(xìng)能也會相應的提高,所以在主軸結構設計時,應盡量減(jiǎn)小主軸轉子的外伸長度值。
4.4.2 臨界轉速的影響因素及(jí)分(fèn)析
(1)如圖 4-10 所示(shì),軸端不平衡(héng)質量與臨界轉速的關係,軸端質量越大,對係統的一階臨界轉速影響較大,但是變化速率是變小的。從圖中(zhōng)可以分析得出,係統軸端不平衡(héng)質量(liàng)越(yuè)小,係統的性能越優越(yuè)。所以應該盡可能的減小軸(zhóu)端不平衡質量的值。
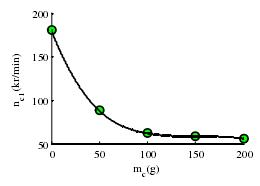
圖 4-10 軸端不平衡質量(liàng)與臨界轉速的關係
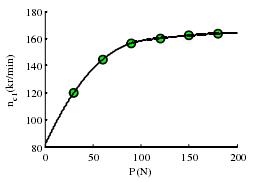
圖 4-11 預載荷(hé)與臨界轉速的關(guān)係
(2)如圖 4-11 所示,預載荷與係統臨界轉速的關係中,隨著預載荷的增加,係統一階臨界轉速也在不斷的增加,變化速率也是(shì)在變小的。這是因(yīn)為預載荷增加,係統(tǒng)支撐軸承的(de)動剛度也相應增加,使得係統的總剛度也相應增加,係統性能也提高了。可以適當(dāng)的(de)增加係統的預載荷,但是預載荷增加後,對支撐(chēng)軸承的壽命影(yǐng)響也變大,所以預載荷應當選擇恰當。
(3)支撐跨距(jù)與係統一階臨界轉速的(de)關係如圖 4-12 所示,隨(suí)著支(zhī)承跨距的增加,係統的臨界轉速整體上是在減小的。當支(zhī)承跨距較小時,係統臨界(jiè)轉速隨著跨距的改變的幅度不(bú)大,當支(zhī)承跨距增加到一定程度時,係統的一階臨界轉速迅速降低(dī),使得係統的性能(néng)也相(xiàng)應降低,所以軸承支承跨距應盡可能的小,以利於提高係統性能。
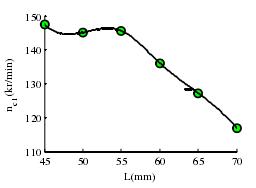
圖 4-12 軸端支承跨距與臨界轉速的關係
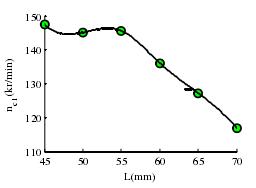
圖 4-13 轉子外伸長度與(yǔ)臨界轉速(sù)的關係
(4)轉子外伸長(zhǎng)度與係統一階(jiē)臨界轉速的關係如圖 4-13 所示,隨著(zhe)轉子外伸長度的增加,係統的臨界轉速也在減(jiǎn)小(xiǎo),而且也(yě)是在轉子外伸長度較小時,係(xì)統一階臨界轉速(sù)變化較小,外伸長度(dù)增加後一(yī)階臨界轉速劇烈較小,這就要求在電主軸設計時(shí),需要對轉子的外(wài)伸長度(dù)有一定的要求,適當較小轉子外伸長度有(yǒu)利於電主軸係統的動態性能提升。
4.4.3 不(bú)平衡響應的影響因素及分析
(1)如圖 4-14 所示,轉子外(wài)伸長度與軸(zhóu)端不(bú)平衡響應(yīng)的關係,可以看出,轉子(zǐ)外伸長度越大,對係統的軸端不平衡響應(yīng)影響(xiǎng)越大,而且變(biàn)化速率也變大。從圖中可以分析得出,係統軸端不平衡質量越(yuè)大,係統的軸端不平衡響應越大,係統的性能越差。所以應該(gāi)盡(jìn)可能的減小軸端不平衡質量的(de)值。
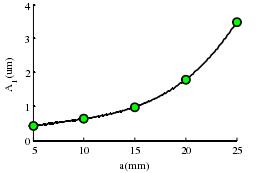
圖 4-14 轉子外伸(shēn)長度與不平衡響應的關(guān)係
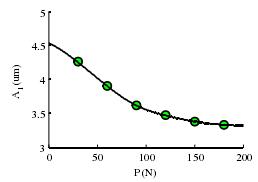
圖 4-15 預載(zǎi)荷與不平衡響應(yīng)的關(guān)係
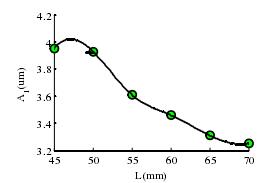
圖 4-16 軸承支承跨距與不平衡響應的關係
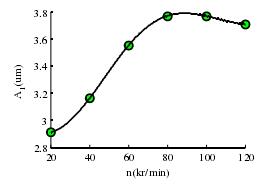
圖 4-17 轉速與不平衡響應的關係
(2)預載荷與軸端不平衡響應的關係如圖 4-15 所示,可以看出,添加在軸上預載(zǎi)荷越大,係統的軸端不平衡響應越小,但是變化率也同時在減小,也就是說,當預載(zǎi)荷增加到(dào)一定(dìng)程度時,預載荷對係統的軸端不平衡響應(yīng)的影響幾乎可以忽(hū)略,雖然預載荷可以減小軸端不(bú)平衡響應,但(dàn)是也(yě)不能盲目的增加,因(yīn)為預載荷過大會降低軸承壽(shòu)命。
(3)如圖 4-16 所示,軸承支承(chéng)跨距與軸端(duān)不平衡響應(yīng)的關係圖,從圖中可以看出,隨(suí)著軸承支承跨距的不斷增加,主軸軸端不平衡(héng)響應不斷的減小,所(suǒ)以(yǐ)從係統的振動響應(yīng)方麵考(kǎo)慮,軸端軸承支承跨距增加有利於減小軸端不平衡響應,從而改(gǎi)善(shàn)係統的動態(tài)性能。但另一方麵,由之前的支承跨距使得一(yī)階固有頻率(lǜ)和一階臨(lín)界轉速減小,對(duì)係統的動態性能又具有一定的副作用。
(4)轉速(sù)對軸端(duān)不平衡響應的影響表現在較低速時增加比較明顯,如圖 4-17所示,隨著轉速的增加,轉子軸端不平衡響應越來越大,最後到一定(dìng)值的(de)時候,基本上就不再增加了。由此可見,電主軸要想得到高轉速時軸端不平衡響應(yīng)較小,需要對其他(tā)影響因素進行控製,畢竟高轉速才(cái)是提高機床(chuáng)加工性能的關鍵。
4.5、本章小(xiǎo)結
本章通過對轉(zhuǎn)速、軸端質量、預載荷、軸承(chéng)支(zhī)承跨距、轉子外伸長度等影響因素對轉子-軸(zhóu)承係統的動態性能產生的影響(xiǎng)進行分析,最終得出以下結論:
(1)主(zhǔ)軸支承軸承的動力學狀(zhuàng)態對係統的(de)性(xìng)能影響比較(jiào)大,特別是動剛度的影響,直接關係(xì)著係統總(zǒng)剛(gāng)度的變化。在(zài)轉子係統高速運轉狀態下,軸承的內部動(dòng)力學狀態影響更是不可忽略。預載荷和轉速對係統的固有頻率、臨界轉速、軸端不平衡響應等影響較大,一定程度的預(yù)載荷增(zēng)加有利於係統性能的提升,但是並不(bú)是預(yù)載荷越大越好,因(yīn)為考慮到預載荷增加會使軸承壽命降低。轉速的增(zēng)加對係統動(dòng)態性能的(de)影響是負麵的,電主軸結構的設計就是為了實現在高轉速狀態下把這些負麵影(yǐng)響降到最低。
(2)軸端附加零件質量、轉子的支承跨距和轉子外伸長度等主(zhǔ)軸轉子結構設計也會對係統的性(xìng)能產(chǎn)生較(jiào)大的影響。轉子的支承(chéng)跨距對係統臨界轉速的影響出現了(le)一個峰值,在峰值(zhí)附近係統的軸端不平衡響應也比較小,可以考慮選取附近的值(zhí)作為係統的支承(chéng)跨距;軸端附加零件質量的影響是負麵的(de),質量越大對係統性能越不利,所以應當適當(dāng)減小軸端零件(jiàn)砂輪等的質量;轉子外伸長度對係(xì)統固有頻率、臨界轉速、軸端不平衡響應的影響和轉子軸端附加零件質量的影響趨勢基本相似,所以外伸長度也應該選取較小的適當的值。
投稿箱:
如果您有機床行(háng)業、企業(yè)相關新聞稿(gǎo)件發表,或進行資訊合作,歡迎(yíng)聯係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行(háng)業、企業(yè)相關新聞稿(gǎo)件發表,或進行資訊合作,歡迎(yíng)聯係本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多本(běn)專題新聞
名企推薦







專題點擊前十
| 更多

